5. MMK2 上位机UI操作文档#
5.1 打开及关闭#
-
打开用户软件
-
解压压缩包,进入mmk2_ui文件夹

-
双击mmk2_ui文件,或同级目录下打开终端、输入:
-
-
关闭用户软件
-
UI界面点击“x”号→“Yes”关闭
-
终端使用键盘“Ctrl + \”关闭
-
5.2 用户界面使用#
5.2.1 界面概览与功能说明#
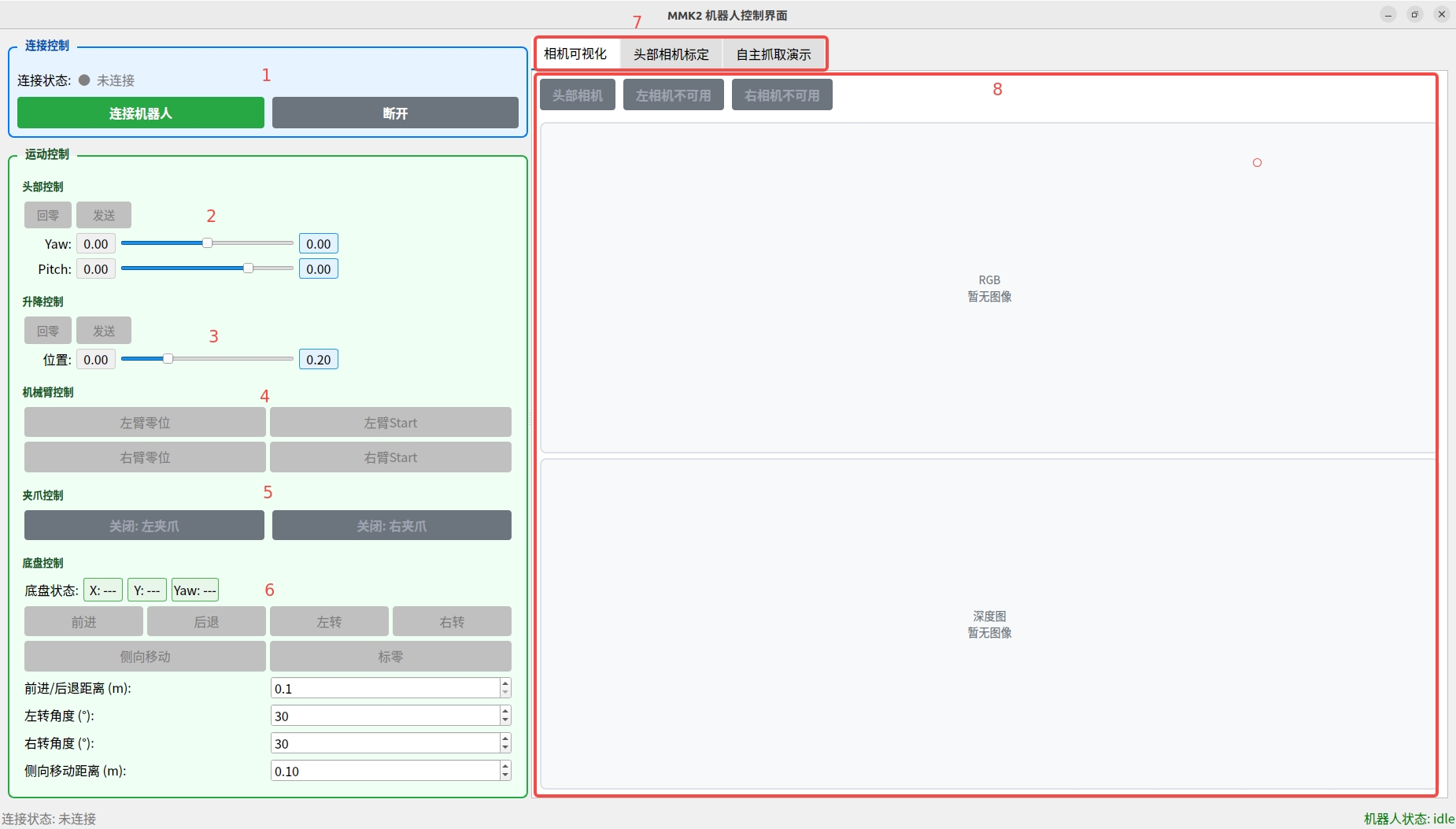
上位机操作主界面
| 模块 | 功能名称 | 说明 |
|---|---|---|
| 1 | MMK2 通讯模块 | 设备连接与状态监控 |
| 2 | MMK2 头部控制模块 | 头部运动与视觉控制 |
| 3 | MMK2 脊柱升降控制模块 | 机身高度调节 |
| 4 | MMK2 机械臂运动控制模块 | 双臂轨迹规划与控制 |
| 5 | MMK2 机械臂夹爪控制模块 | 夹持器开合操作 |
| 6 | MMK2 底盘控制模块 | 移动底盘运动控制 |
| 7 | MMK2 功能模块 | 可视化、相机标定、Demo演示 |
| 8 | 功能块实现区域 | 指令执行与状态反馈 |
使用建议
- 推荐使用全屏模式,以获得最佳操作体验
- 当窗口宽度过窄时,部分功能区可能被隐藏
- 建议屏幕分辨率不低于 1920×1080
5.3 功能模块详解#
5.3.1 MMK2通讯模块#
功能概述:该模块提供 MMK2 机器人的连接管理界面,支持有线与无线两种连接方式:
- 有线连接:默认 IP
192.168.11.200 - 无线连接:IP 地址获取方法请参考无线连接
RealSense 相机序列号查询:
# 1. 测试有线连接
ping 192.168.11.200
# 2. 远程登录, 密码: airbot
ssh orangepi@192.168.11.200
# 3. 查看相机序列号
docker exec -it airbot_mmk2_1.1.3 bash #airbot_mmk2_1.1.3为已启动的容器名
rs-enumerate-devices | grep Serial
# 4. 重启容器(查询SN后必需步骤)
docker restart airbot_mmk2_1.1.3 #exit退出容器后,在香橙派中执行

连接配置示意图
操作步骤:
-
输入目标 IP 地址和端口号(默认50055)。
-
选择需启用的相机类型及相关参数;若选择 RealSense 相机,需填写对应设备序列号。
-
支持保存当前配置,并可随时加载已保存的配置以还原参数。
-
点击 “OK” 后跳转至主页,连接状态将更新为 “已连接”。
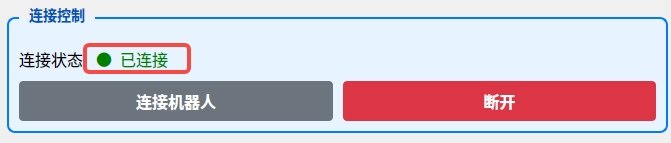
连接状态示意图
- 点击 “断开” 按钮,即可断开与 MMK2 的连接。
5.3.2 头部控制模块#
功能概述:该模块提供头部姿态的手动调节功能,支持两个旋转自由度的精确控制:
- Yaw(偏航角):控制头部左右转动
- Pitch(俯仰角):控制头部上下摆动
参数单位:弧度
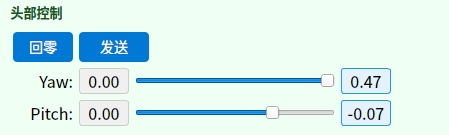
头部控制示意图
重要提示
- 使用前请确保左右机械臂已移动至 Start 位置,避免发生碰撞
- 实际位置控制可能存在约 ±0.01 米 的误差范围
操作步骤:
-
头部回零
点击 "回零" 按钮,头部将自动返回预设的零点位置。 -
姿态调整
拖动滑块至目标位置后点击 "发送",头部将精确移动至指定姿态。
5.3.3 脊柱升降控制模块#
功能概述:该模块用于精确控制 MMK2 脊柱的升降高度,支持位置调节和一键归位功能。
参数单位:米
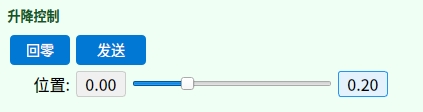
脊柱升降控制示意图
操作步骤:
- 快速归零
点击 "回零" 按钮,脊柱将自动返回预设的零点位置。 - 高度调节
拖动滑块至目标高度后点击 "发送",脊柱将移动至指定位置。
5.3.4 机械臂运动控制模块#
功能概述:该模块提供 MMK2 机械双臂的位姿控制,支持位置与姿态的调节。

机械臂运动控制示意图
安全提示
使用前请确保头部已执行回零操作,避免机械臂与头部发生碰撞。
操作步骤:
- 关节复位
点击 "零位" 按钮,将机械臂所有关节角度重置为零。 - 起始位姿
点击 "Start" 按钮,机械臂将恢复至预设的安全起始位置。
5.3.5 夹爪控制模块#
功能概述:该模块专用于控制 MMK2 双臂夹爪的开合动作,实现抓取与释放功能。

夹爪控制示意图
5.3.6 底盘运动控制模块#
功能概述:该模块提供机器人底盘的基本运动控制,支持前进、后退、旋转及侧向移动,可通过距离、角度参数实现精确位姿调整。
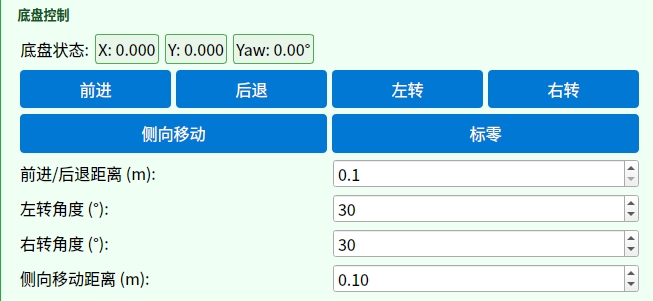
底盘运动控制示意图
运动控制:
- 参数设置:在输入框中设定步进距离或旋转角度
- 定向移动:
- 前进/后退:底盘沿当前方向移动指定距离
- 左转/右转:底盘原地旋转指定角度
- 侧向移动:底盘向侧方平移指定距离
- 位置校准:点击 "标零" 按钮,将当前底盘位置设为零点参考
5.3.7 MMK2 功能模块#
5.3.7.1 相机可视化界面#
功能概述:该模块提供已连接相机的实时图像数据显示功能,支持彩色图、深度图及对齐融合视图的实时监控,便于视觉系统的调试与运行状态观察。
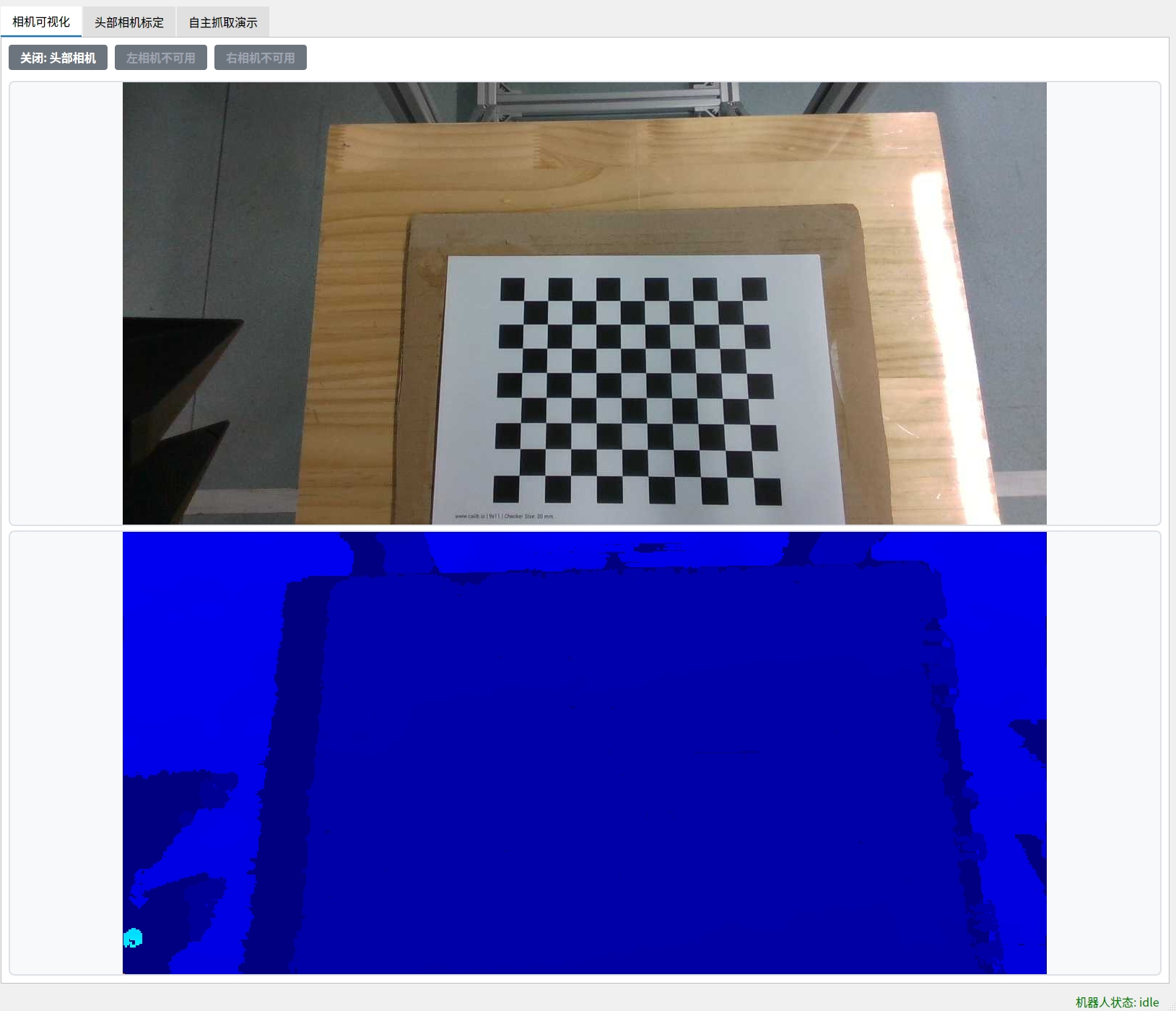
相机可视化界面示意图
使用说明
- 操作方式:点击对应相机图标启动设备,初始化完成后自动显示实时图像
- 相机切换:切换至其他相机会自动关闭当前已开启的相机
重要注意事项
- 系统资源:同时连接三台 RealSense 相机时,建议至少一台配置为 480p 分辨率以平衡性能
- 性能影响:启用深度图及深度-彩色对齐功能后,计算负载增加,帧率会明显下降
- 参数修改:相机参数(分辨率、帧率、对齐等)首次配置后无法动态修改,需重启下位机(重启容器或者主体电源)生效
- 深度显示:如需显示深度图,连接前请勾选"对齐深度"选项
5.3.7.2 头部相机标定#
5.3.7.2.1 相机内参标定#
功能概述:该模块用于确定相机内参(焦距、主点、畸变系数)和外参(相对于机器人坐标系的位置与姿态),是实现高精度视觉感知与传感器融合的基础。建议在相机安装位置变动或环境显著变化后重新标定。

相机内参界面示意图
标定准备: - 准备 A4 纸大小的棋盘格标定板 - 下载标定板 PDF 文件 并打印,确保打印缩放比例为 100%
标定步骤:
- 启动相机:开启头部相机
-
图像采集:可通过两种方式获取多角度图像:
- 方式一:使用运动控制模块驱动头部至不同观测角度,点击 "采集图像"
- 方式二:保持头部固定,手动移动标定板位置,确认标定板在相机视野内清晰可见后,点击 "采集图像"
💡 采集说明:系统自动检测标定板角点,仅保存有效图像;建议累计采集至少 40 张 有效图像用于标定。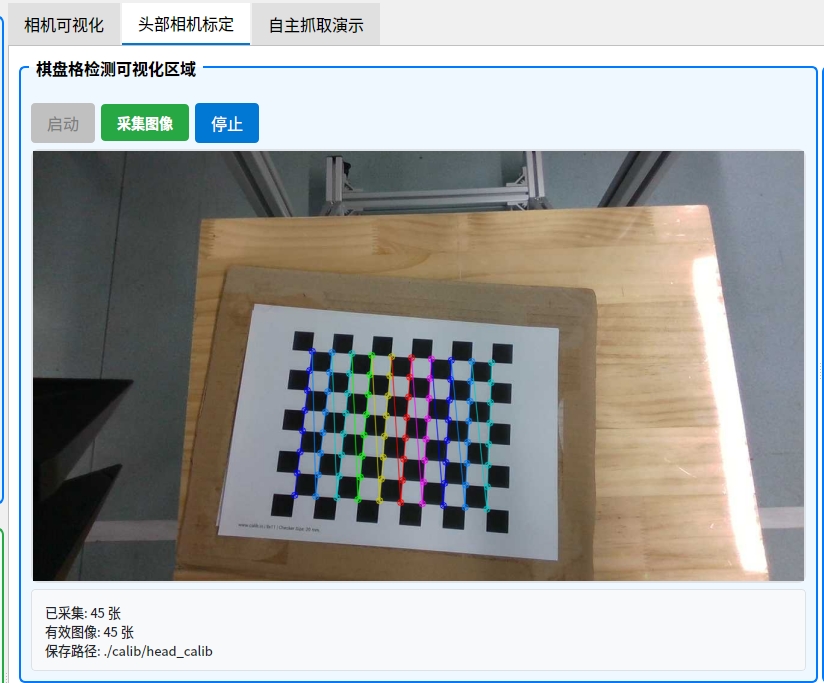
棋盘格采集界面示意图
-
执行标定:点击 "开始标定",系统生成误差分析图
-
结果评估:平均误差 小于 0.02 为理想效果,点击 "保存标定结果"
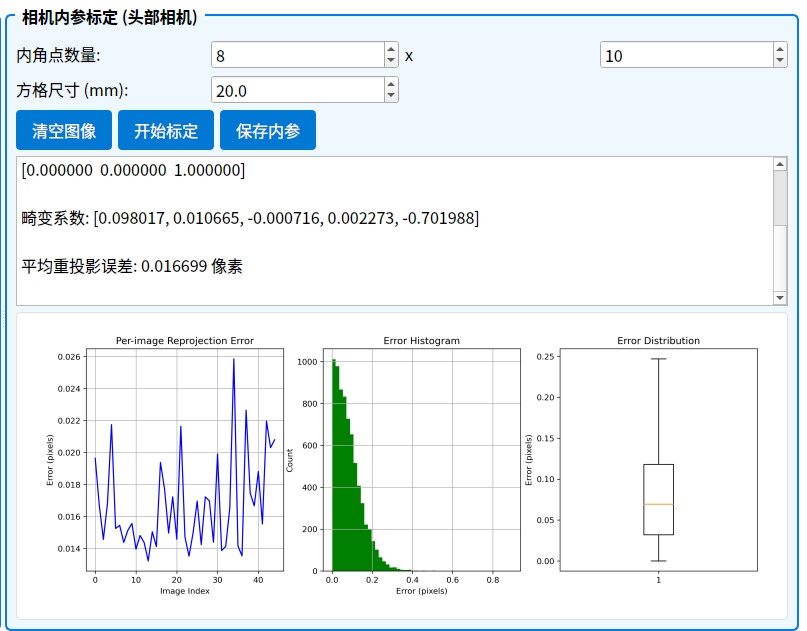
相机内参标定结果示意图
5.3.7.2.2 ArUco 检测可视化#
功能概述:该模块通过实时检测 ArUco 标记并叠加重投影结果,直观验证相机标定的准确性。

ArUco检测示意图
操作流程:
-
准备标定板:
- 准备 A4 大小的标定板
- 下载ArUco PDF 文件打印并粘贴(确保完全水平竖直)
-
加载参数:点击加载内参,导入头部相机标定保存的参数
-
机器人位姿设置:
- 将双臂设置为零位
- 调整脊柱高度,设置头部为零位
- 确保头相机能够完整观测到 ArUco 码
-
执行检测:点击aruco检测可视化开始实时检测
-
精度验证:确保误差值均 <3°,否则建议进行外参校准
5.3.7.2.3 ArUco 外参校准#
功能概述:该模块用于确定相机坐标系与机器人坐标系之间的刚体变换关系(旋转和平移),是实现视觉引导抓取、手眼协同和空间定位的关键步骤。建议在相机或标定板安装位置发生变化后重新校准。

ArUco外参校准示意图
校准步骤:
-
计算补偿:点击 "计算补偿",程序自动采样并计算补偿值
补偿计算示意图
-
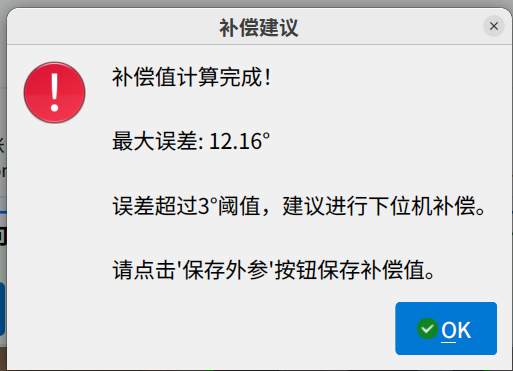
保存外参:点击 "保存外参",根据提示进行补偿值调整
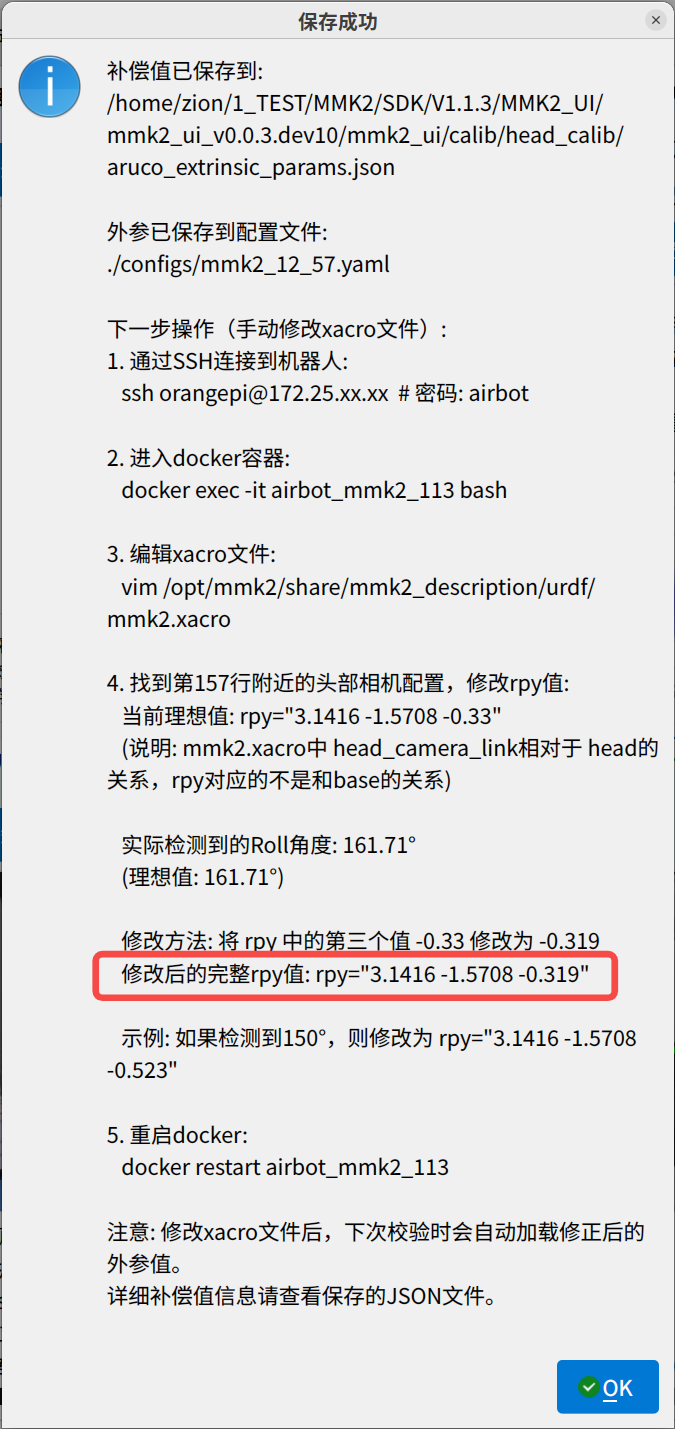
外参补偿示意图
-
验证结果:再次点击 "计算补偿",确认显示范围在允许范围内
补偿结果示意图
5.3.7.3 自主抓取演示模块#
功能概述:该模块提供完整的抓取任务管理功能,支持机器人抓取操作的配置、执行与实时监控。
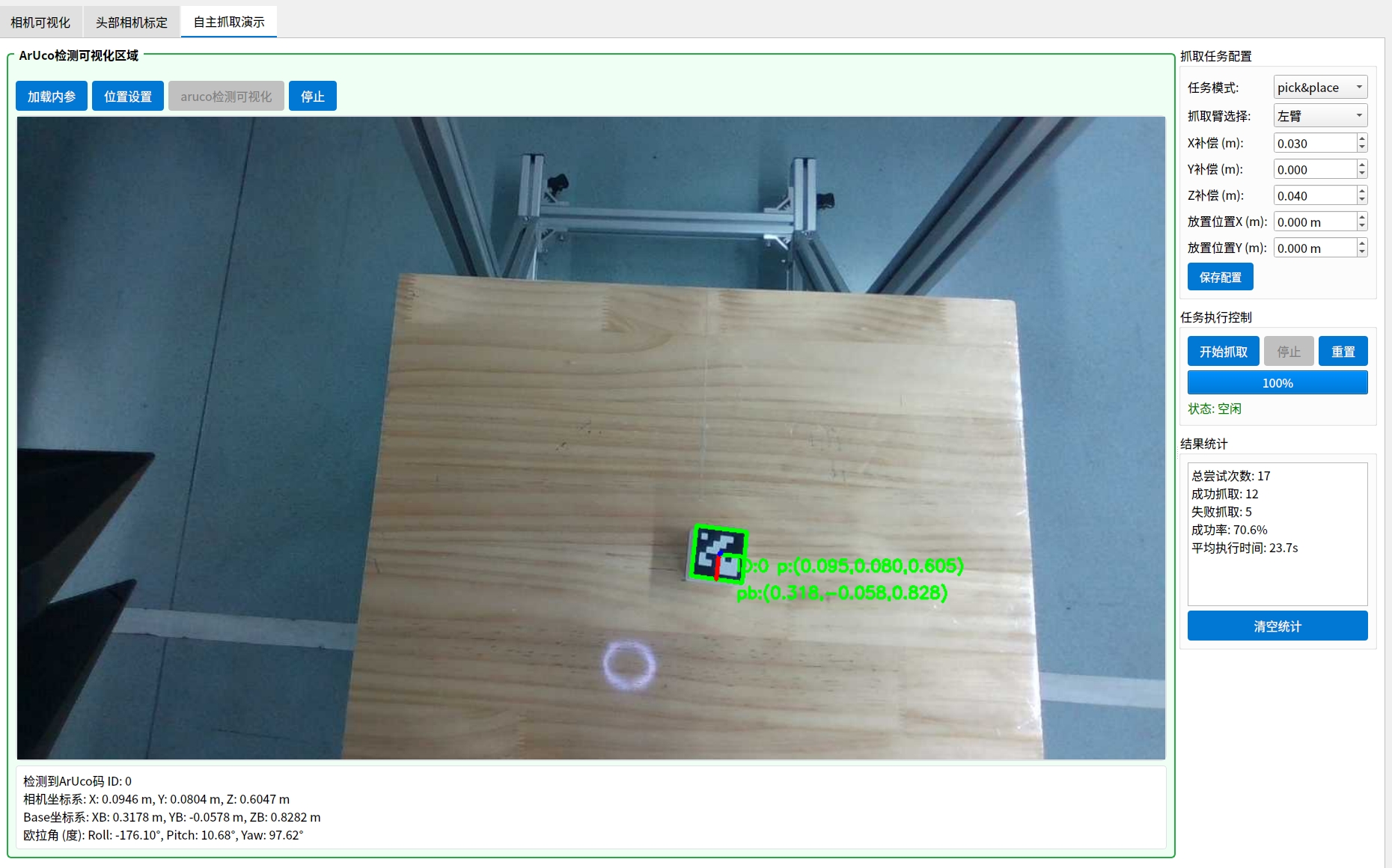
自主抓取示意图
关键准备工作
任务开始前请完成以下配置:
- 相机设置:将头部相机分辨率调整为 720p
- 底盘校准:进入底盘控制模块,点击 "标零" 设置零点
- 机械臂复位:将升降模块和机械臂移动至 零位 状态
抓取参数建议
Z轴补偿设置:
- 开始抓取前,建议将 Z 轴补偿值设置为 0.1 以上
- 较大补偿值可有效避免夹爪与目标物体发生碰撞
-
准备工作: A4纸以实际大小打印aruco PDF 文件,裁剪并粘贴到 4cm³ 的方块或等边物体
-
可视化区域:
-
点击加载内参,加载头部相机标定保存的参数
-
点击aruco检测可视化,系统将会自动调整图像显示的大小,以达到最佳可视化效果
-
点击位置设置,调整头部与升降位置,确保可执行区域在图像显示区域内完整呈现
-
-
抓取任务配置:
-
在抓取任务配置中,选择所需的任务模式及执行臂,其他参数按照首次抓取位置与实际目标的偏差进行调整
-
点击保存配置,会保存设置的参数
-
-
任务执行控制:
-
点击开始抓取,观察首次抓取位置与实际目标的偏差,随后在抓取任务配置中微调相关参数,继续尝试抓取,直至达到满意效果
-
点击停止会结束当前任务
-
点击重置机械臂会回到起始位置
-
-
结果统计: 点击清空统计,重置数据统计
5.4 注意事项:#
-
点击功能按键后,等待当前操作完全执行完毕,再进行下一次操作,否则可能导致界面无响应;
-
使用头部控制模块前,先将左右机械臂移动到Start位置,避免碰撞;
-
使用机械臂控制模块前,先将头部回零,避免碰撞;
-
使用升降控制模块前,先将左右机械臂移动到Start或者零位位置,避免碰撞;
-
相机参数若需调整,重启docker容器或者机器人才能使新配置生效;
-
使用【5.3.7.3 自主抓取】前,请先执行底盘标零操作、头部相机分辨率调用720p、并将升降和机械臂移动到零位;
-
使用【5.3.7.3 自主抓取】时,谨慎控制升降距离,避免碰撞双臂,建议每次移动0.05m以内;
-
在头部相机安装位置变动或环境发生显著变化后,需要重新进行头部相机标定及ArUco外参校准。