1. 产品简介#
信息阅读约花费 5 分钟。
AIRBOT Play 是一款高集成度、强拓展性的智能轻型机械臂,拥有高负载自重比, 支持多种移动平台、处理器、传感器和执行器的融合应用,提供Python 及 C++ API接口,支持ROS2,覆盖机器人应用开发的全流程,您可以基于它轻松进行二次开发,探索科研创新与行业应用。 配合高保真仿真器 DISCOVERSE,用户可轻松打通 Real-to-Sim-to-Real 链路,加速具身智能模型训练与部署。
请先参照本章节,学习 AIRBOT Play 机械臂的基础信息,并基于硬件安装页面点亮机械臂,此后,您可基于SDK概述熟悉该版本的更多信息,并通过开发接口介绍与丰富例程,开始自己的开发之旅!
售前咨询:如需了解产品功能、报价等,欢迎发送邮件至📧 contact@discover-robotics.com,或添加售前微信咨询。
售后支持(已购买用户):如有问题或需要帮助,请查阅文档或联系专属售后团队,获取一对一技术支持与服务。

售前服务

售后服务
1.1 技术参数#
| 特性 | 规格 |
|---|---|
| 自由度 | 6 |
| 重量 | 3.78 kg |
| 额定负载 | 1.5 kg(持续运行) |
| 工作半径 | 647 mm |
| 电源输入 | 24 V ± 5%, 10 A |
| 最大功耗 | 240W |
| 连接方式 | USB |
| 重复定位精度 | 0.1 mm |
| 工作温度 | -10°C 至 55°C |
| 控制模式 | PVT、MIT、CSV、CSP |
| 动力学支持(state_machine) | 重力补偿、碰撞检测 |
| SDK | Python、C++、ROS2 |
| 仿真器 | DISCOVERSE、MuJoCo |
| 关节编号 | 关节运动范围 | 关节最大速度 |
|---|---|---|
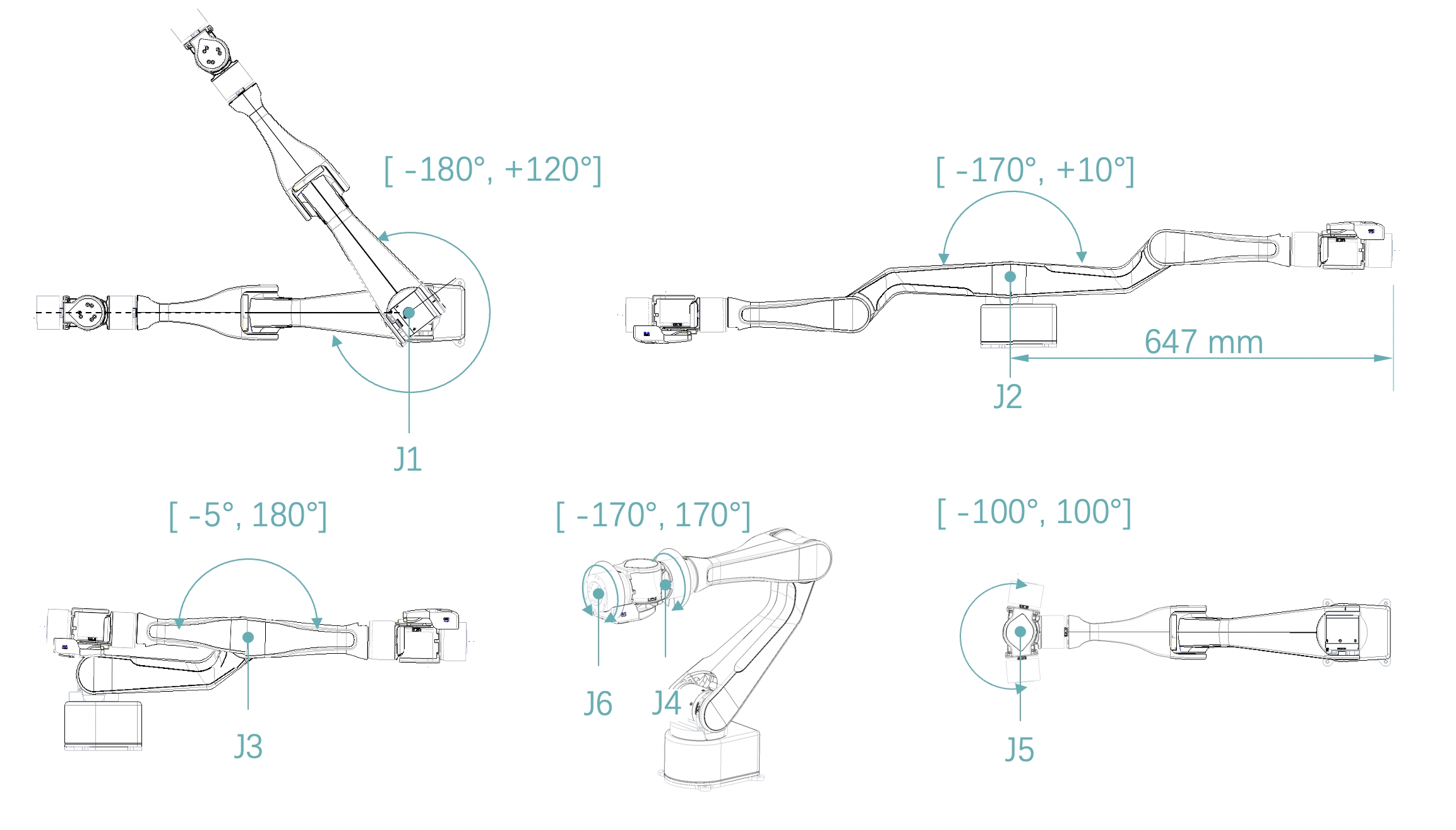
| J1 | [-180°, +120°] | 180°/s |
| J2 | [ -170°, +10°] | 180°/s |
| J3 | [ -5°, +180°] | 180°/s |
| J4 | [-170°, +170°] | 360°/s |
| J5 | [-100°, +100°] | 360°/s |
| J6 | [-170°, +170°] | 360°/s |
1.2 机械结构#
1.2.1 关节示意图#
AIRBOT Play 机械臂拥有 6 个自由度,由 J1-J6 六个关节电机构成。
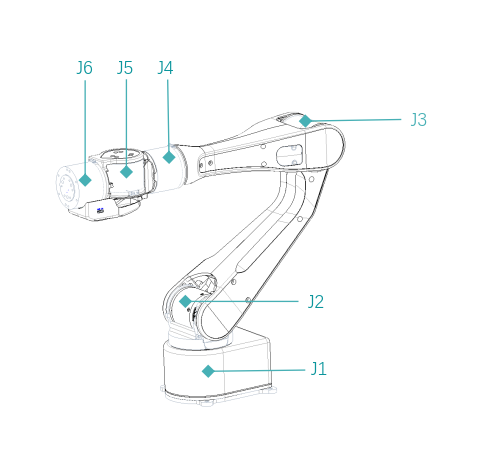
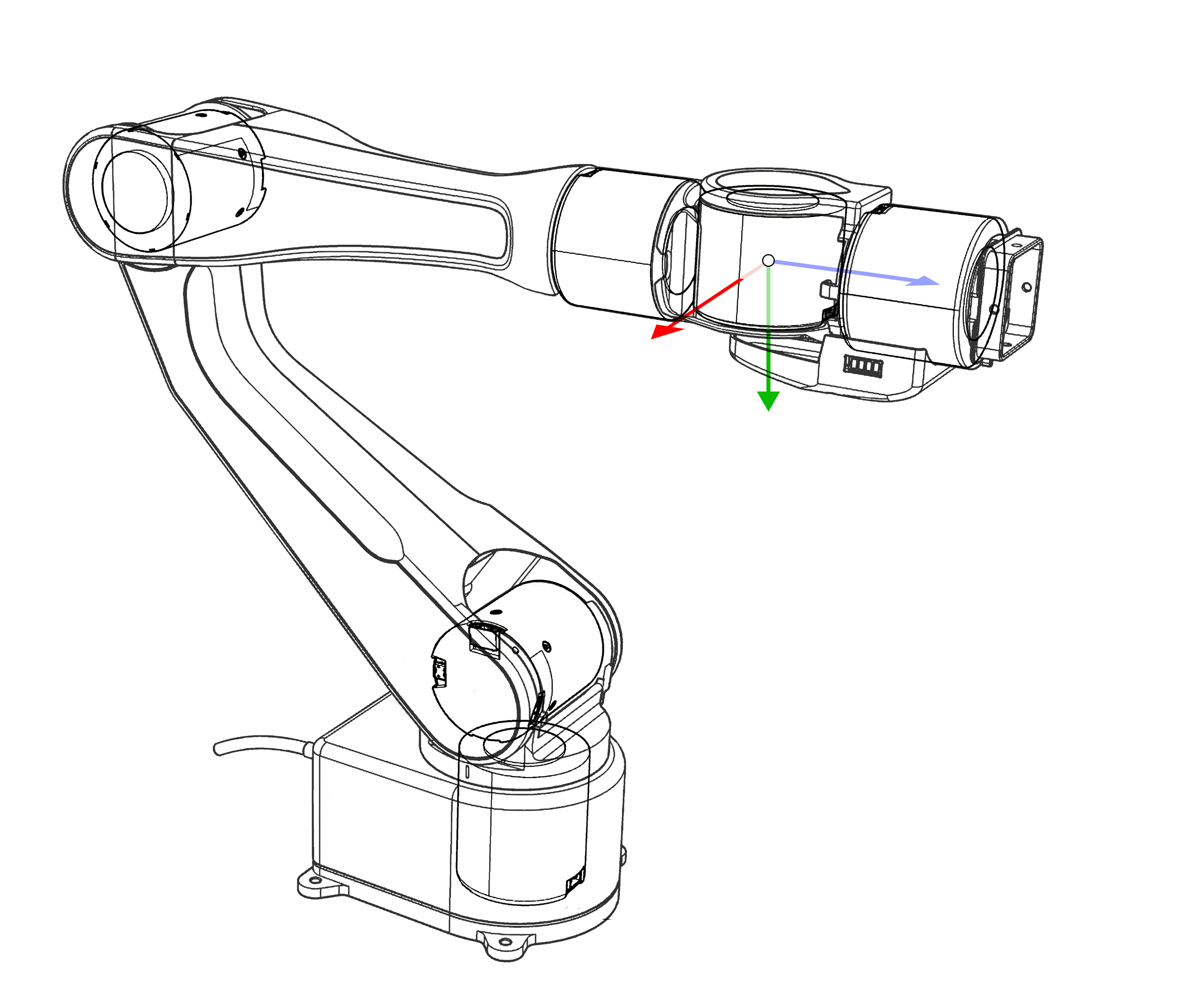
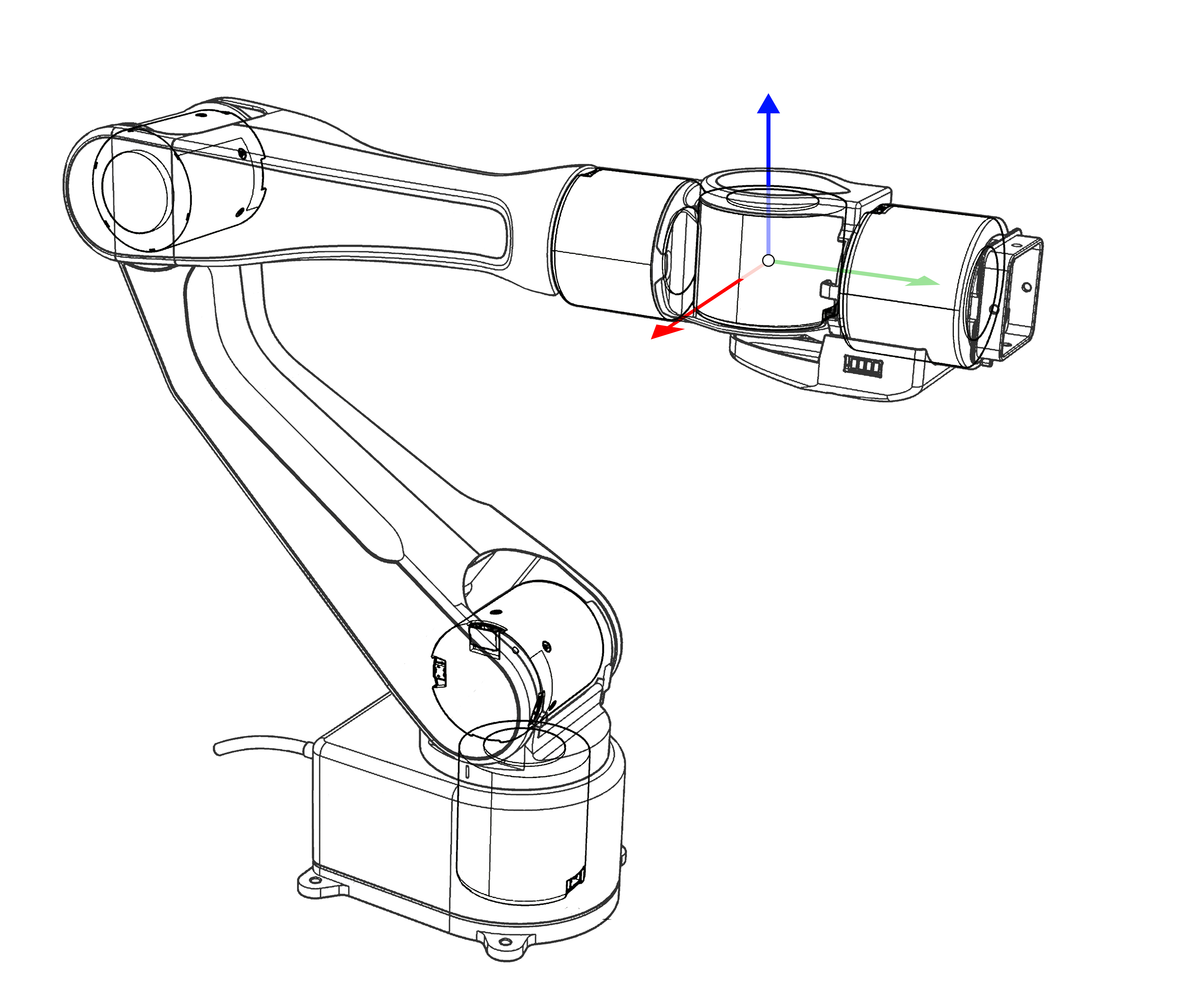
各关节坐标系定义基于右手系,参见下方图片,坐标系的 XYZ 轴的颜色设置为: X 轴 - 红色,Y 轴 - 绿色,Z 轴 - 蓝色。 颜色朝向表示该坐标轴的正方向。
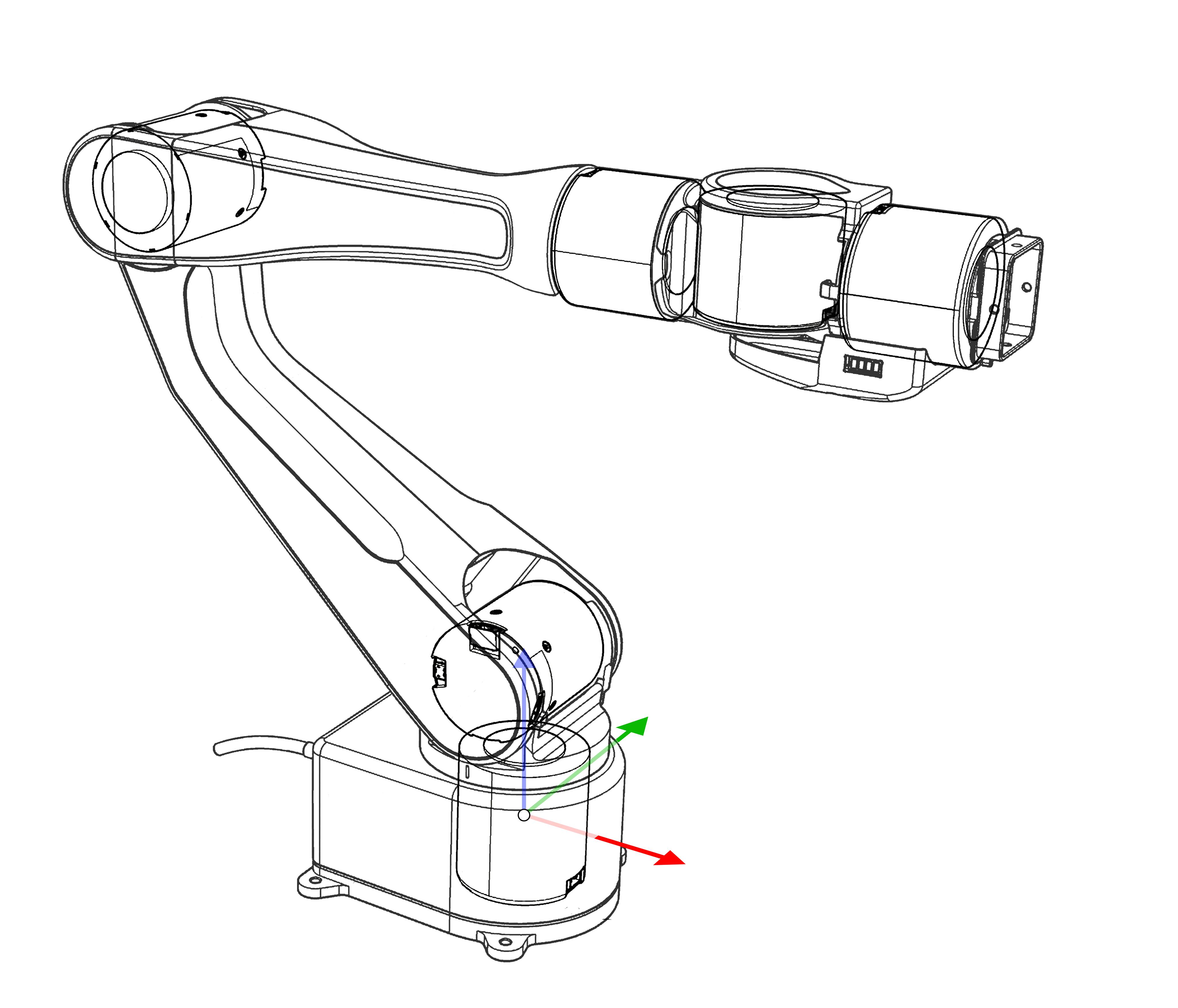
关节1(J1)
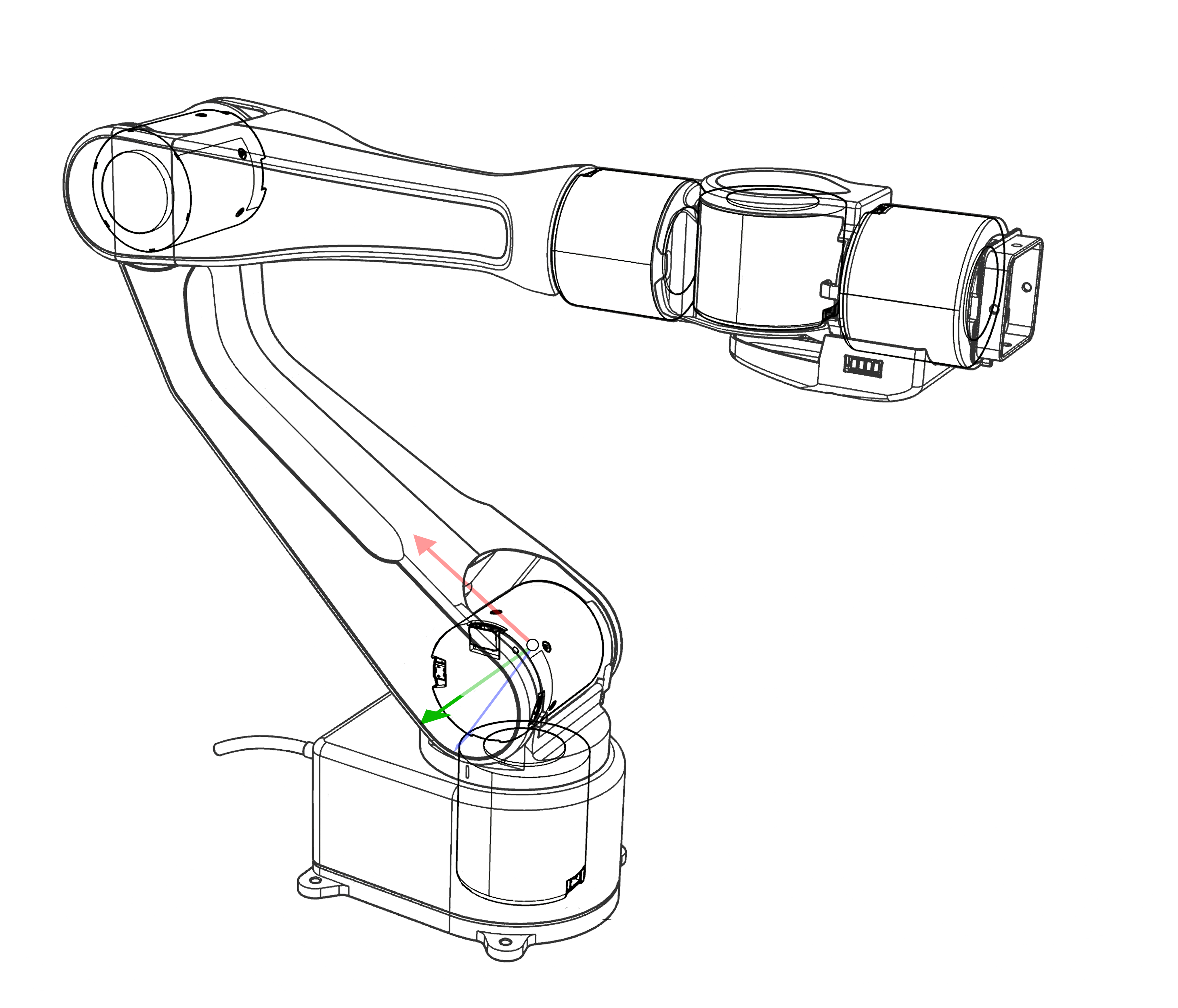
关节2(J2)
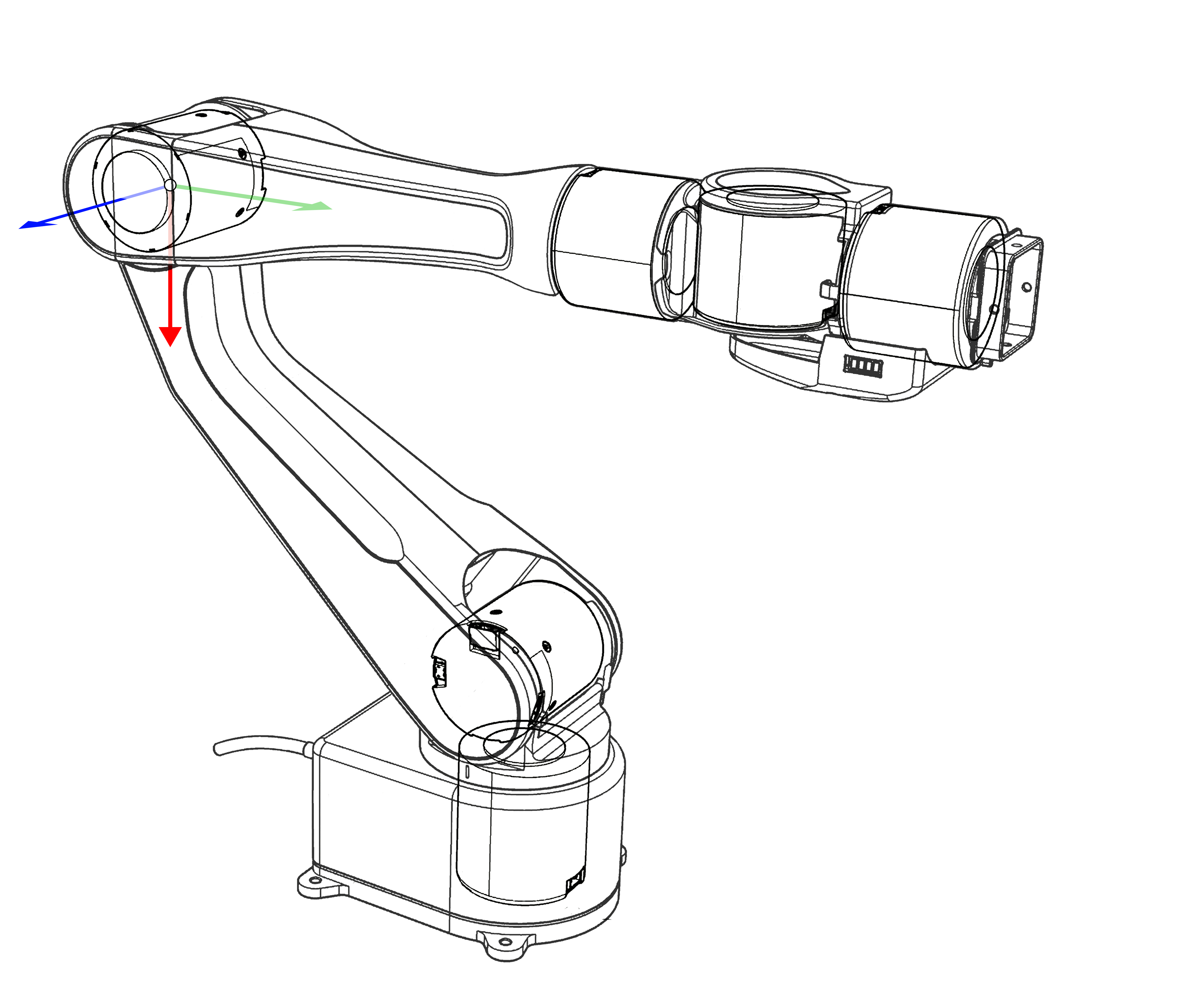
关节3(J3)
关节4(J4)
关节5(J5)
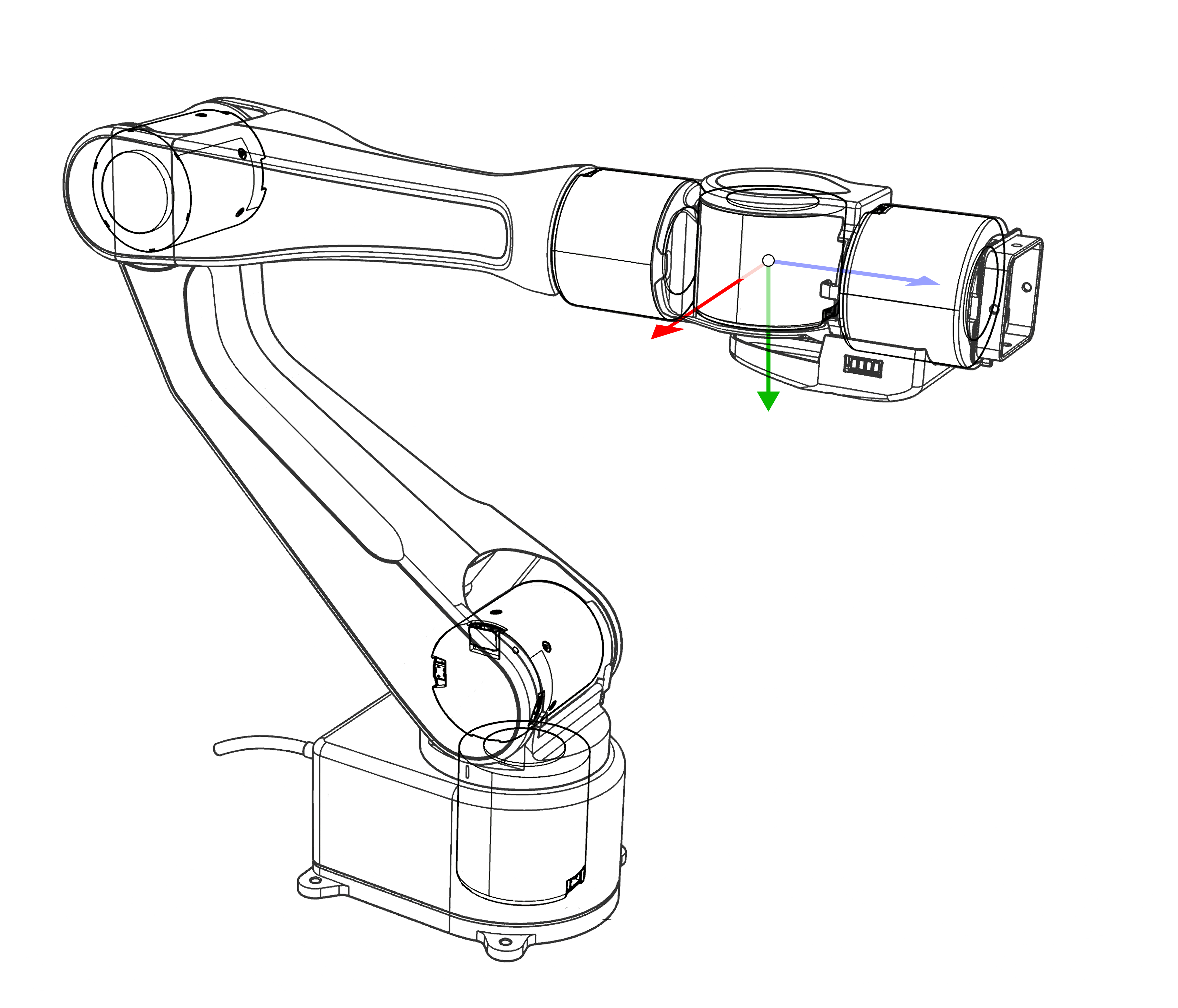
关节6(J6)
1.2.2 工作空间#
AIRBOT Play 不带末端执行器的最大工作半径为 647 mm,各关节活动空间如下图所示。
1.3 硬件接口#
AIRBOT Play 机身接口主要分布在机械臂的底座和末端。
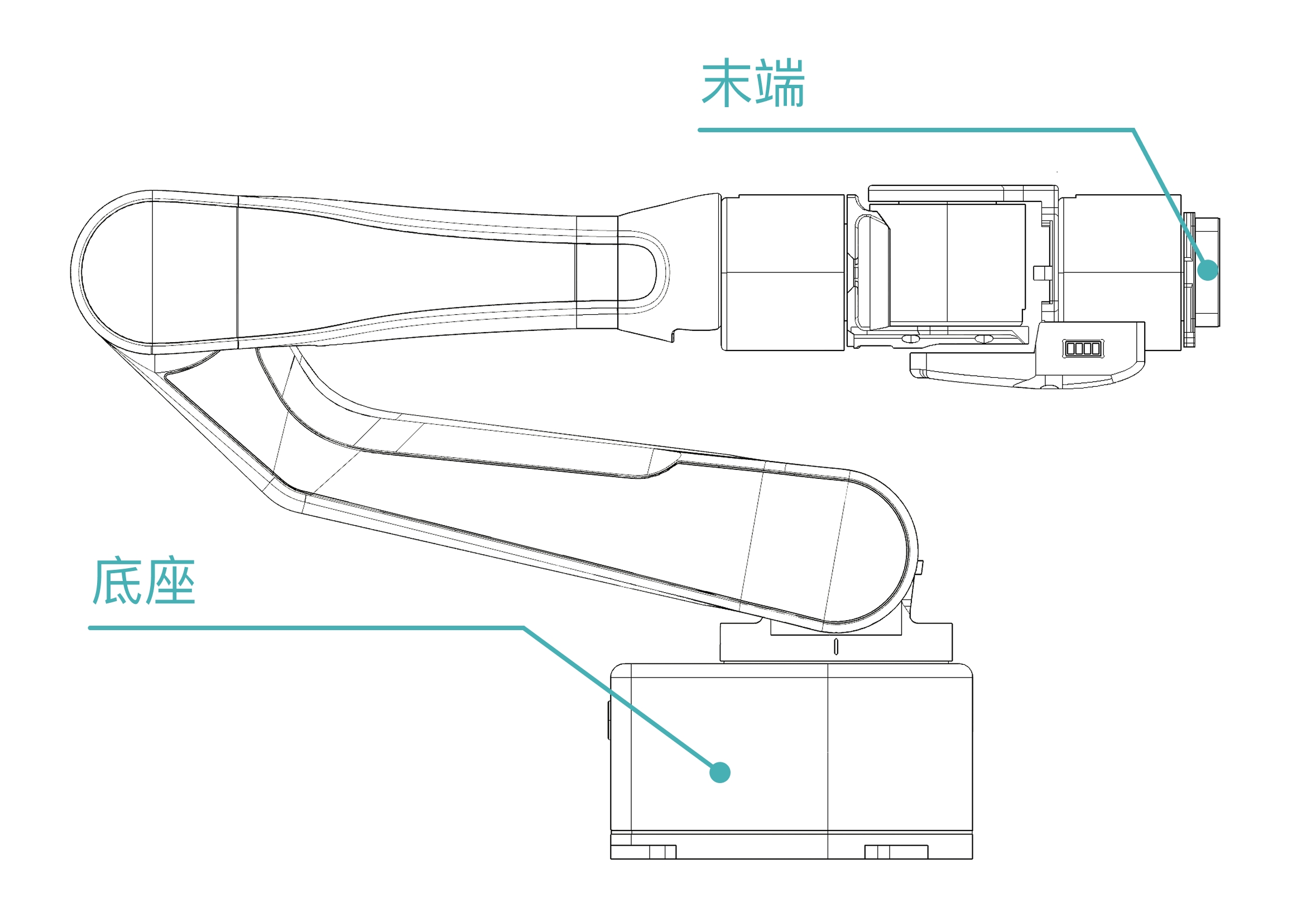
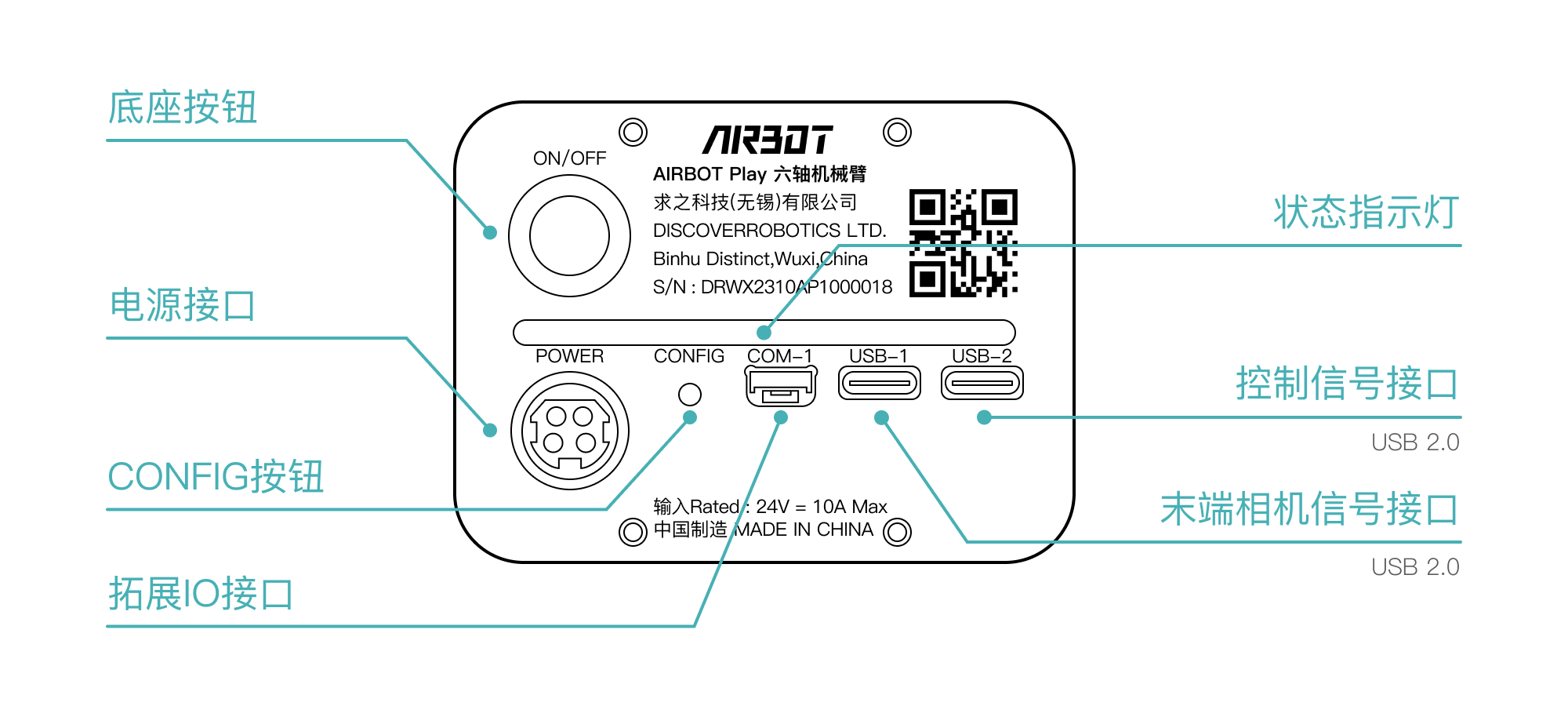
1.3.1 底座接口#
底座接口均分布于底座面板。
-
电源接口:用于连接机械臂的电源线,通过电源适配器输出的航空插头连接。
-
信号接口:用于连接信号线。
USB
-
USB-1 (TypeC) 接口将末端相机信号传递至上位机,用于末端视觉传感器数据传输。
-
USB-2 (TypeC) 接口将通过USB数据线连接上位机,用于数据传输和控制。
-
-
其他接口请按需咨询技术支持团队。
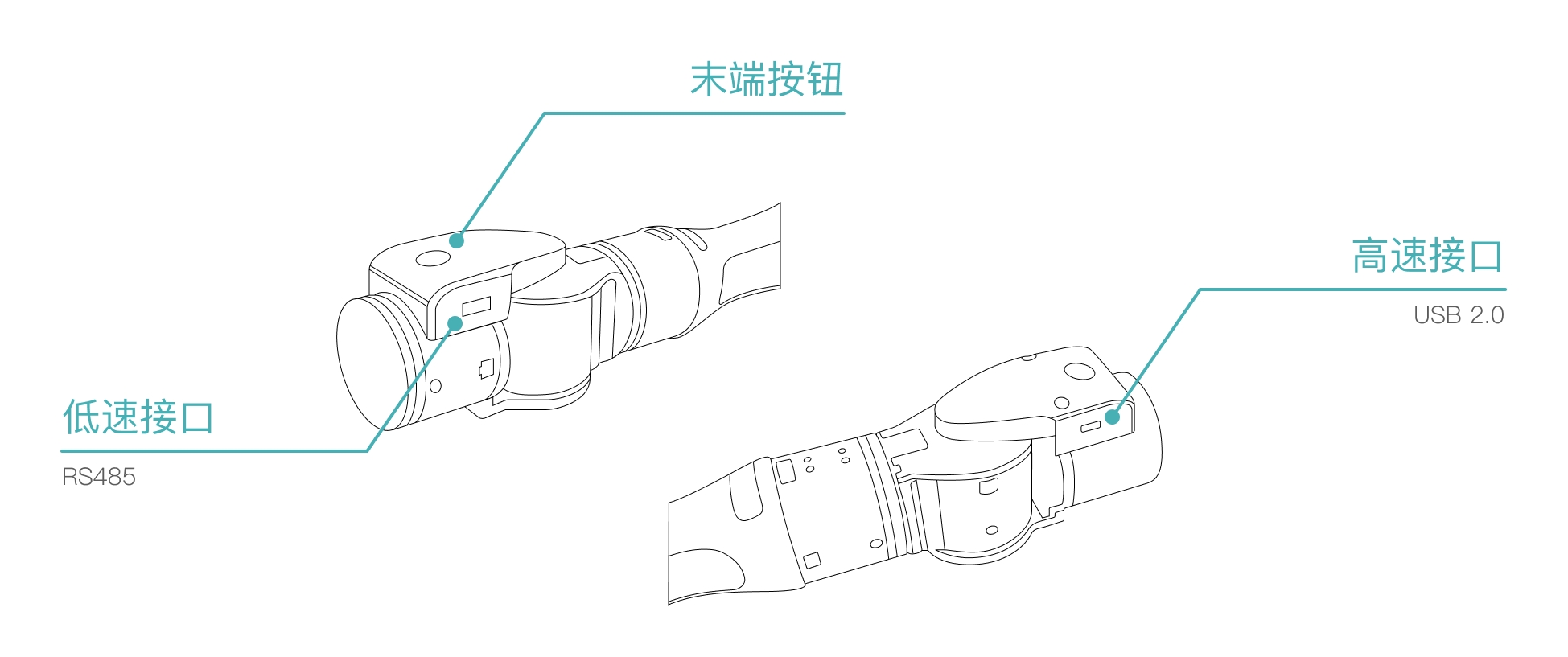
1.3.2 末端接口#
-
末端按钮:用于控制机械臂的状态切换。
-
末端信号接口:连接机械臂末端设备信号,通过机械臂内部走线传递至机械臂底座板的 USB-2 接口,确保机械臂外观整洁、减小工作空间受到的外部走线的干扰。
- 低速接口:用于连接支持 RS 485 通信的末端传感器或执行器。
- 高速接口:用于连接支持 USB 2.0 传输的末端传感器或执行器。
1.4 状态与灯效说明#
AIRBOT Play 机械臂的状态灯条位于底座面板上,状态灯条的颜色和闪烁频率可以帮助用户直观了解机械臂的工作状态(可参考5.1.6版本,本版本无灯效变换)。