13. ACT 模型#
13.1 介绍#
确保计算机配备 NVIDIA 显卡(显存小于 16G 可能无法训练大多数模型),并且 nvidia-smi 命令可用(驱动已安装)。
推荐使用 anaconda 管理 Python 环境。可运行以下命令来下载安装(如果下载速度过慢,可以点击这里手动下载):
wget https://mirrors.tuna.tsinghua.edu.cn/anaconda/miniconda/Miniconda3-py38_4.9.2-Linux-x86_64.sh
chmod u+x Miniconda3-py38_4.9.2-Linux-x86_64.sh && ./Miniconda3-py38_4.9.2-Linux-x86_64.sh
重新启动终端,即可使用 conda:
13.2 安装#
推荐使用 conda Python 环境。如果还未安装,可以使用以下命令创建并激活:
克隆仓库,或联系售后服务以获取安装包:
运行以下命令安装所需的包:
此外,针对模型训练,请确保已搭建好软件、硬件的机器人控制环境,例如 AIRBOT Play、TOK2、MMK2 等。
评估还需要使用 airbot-data-collection 包,该包可通过我们的售后服务获得。
13.3 预训练权重#
首次运行训练或评估命令时,会自动下载预训练权重文件。
若您的终端没有代理,下载可能会失败。可以使用以下链接手动下载该文件(复制并粘贴到浏览器中):https://download.pytorch.org/models/resnet18-f37072fd.pth。
或者,可以联系售后服务获取该文件,然后通过执行以下命令将其移动到指定目录:
mkdir -p ~/.cache/torch/hub/checkpoints/ && mv resnet18-f37072fd.pth ~/.cache/torch/hub/checkpoints/
13.4 参数配置#
训练或推理前准备,参数配置是必要的。 请在 ./configurations/task_configs 目录下创建一个与任务同名的 Python 文件(不建议直接修改或重命名 example_task.py 文件)来配置任务。
该配置主要涉及修改各种路径(使用 replace_task_name 函数来使用默认路径或手动指定路径)、摄像头名称(camera_names)、state_dim、action_dim 等参数。 下面是来自 example_task.py 的示例,展示了如何基于 template.py 中的默认配置进行修改,而无需重写全部内容(如需更灵活的配置,请参考 ./configurations/task_configs/template.py):
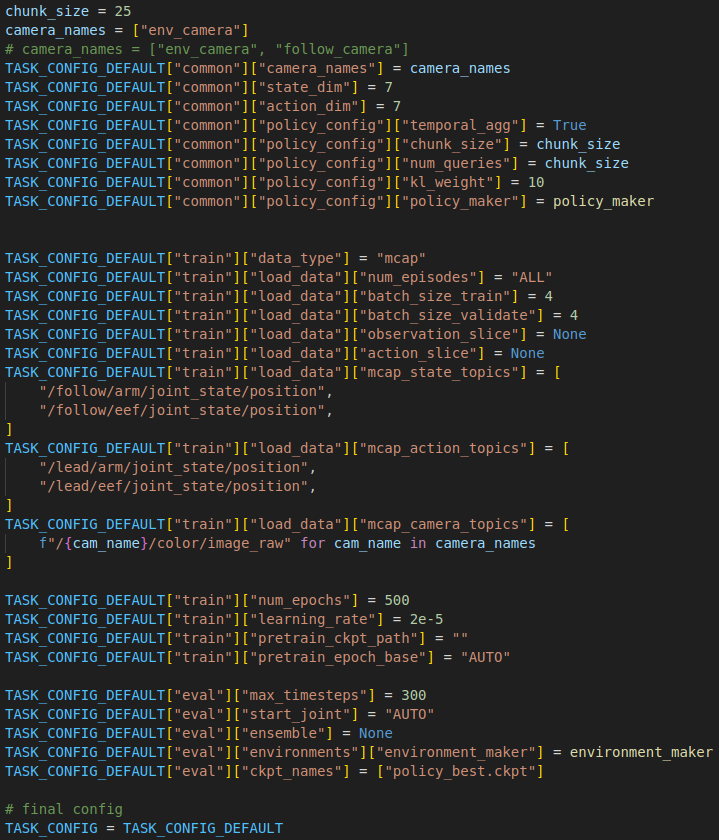
以上文件可作为单臂任务训练和推理的参考示例。对于不同的 AIRBOT 机器人,请在 configurations/task_configs/airbots 目录下选择对应的默认配置文件。 例如,对于单个 AIRBOT Play 任务,请参考 airbot_play_example.py,对于双臂 AIRBOT Play 任务,请参考 airbot_ptk_example.py。
camera_names 参数可以是常用的摄像头 ID 编号,或摄像头所连接的 USB 端口编号。 关于如何获取摄像头 USB 端口编号,请参考数据采集文档。
13.5 数据预处理#
当使用默认路径进行训练时,请将 .mcap 数据文件放在 ./data/mcap/<task_name> 文件夹中。
可以使用以下命令创建该目录:
然后,可以手动复制数据,或使用类似下面的命令(记得修改命令中的路径):
13.6 模型训练#
进入仓库文件夹并激活 Conda 环境:
然后运行训练命令:
上述命令仅使用 -tn 参数时,会使用 configurations/task_configs 文件夹中对应任务名称的 .py 配置文件中的配置。
训练完成后,默认情况下,你可以在 ./my_ckpt/<task_name>/<time_stamp> 目录中找到两个文件夹:
ckpt 文件夹包含所有权重文件(称为 process folder),而与 <task_name> 同名的文件夹(称为 core folder)包含以下文件:
- 最终权重和最优权重:分别为
policy_best.ckpt和policy_last.ckpt - 统计数据:
dataset_stats.pkl - 关键信息(包括初始关节角度、训练参数配置等):
key_info.pkl - 训练损失曲线:
train_val_kl_seed_0.png、train_val_l1_seed_0.png和train_val_loss_seed_0.png - 训练结果的简单描述:
description.txt,例如Best ckpt: val loss 0.174929 @ epoch9499 with seed 0
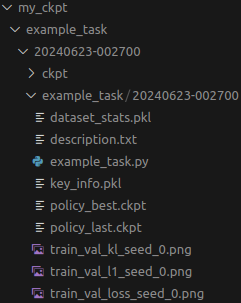
为了方便后续使用,建议将 core folder 存储在指定磁盘的 Imitate-All/my_ckpt 文件夹中。
13.7 模型评估#
请确保已安装用于控制机器人(仿真或实物)的必要依赖。以下示例展示了如何使用 AIRBOT Play 机械臂来评估模型。
如果使用 realsense,请先安装:pip install pyrealsense2 || pip install pyrealsense2-beta。
13.7.1 环境配置#
- 连接机械臂。
- 按照数据采集时的顺序或 USB 端口连接摄像头,如果自数据采集后未断开,则可跳过此步骤。
- 启动机械臂服务器:
对于单臂任务,只需运行其中一条命令,并将-i参数修改为实际值,例如can_follow。
13.7.2 检查任务配置#
模型推理需要使用与训练相同的配置文件,并且需要调整推理部分的参数。
这主要包括修改 environment_maker 函数和 TASK_CONFIG_DEFAULT["eval"] 字典。
13.7.3 推理#
进入仓库文件夹并激活 conda 环境:
评估命令及参数(请确保没有其他程序占用摄像头,如数据采集相关程序等):
python3 policy_evaluate.py -tn example_task -cf configurations/basic_configs/example/environment/airbot_ptk.yaml -ts 20250608-213703 -show -mts 250
-ts:对应任务的时间戳(检查模型训练结果保存路径,例如my_ckpt/example_task/20240325-153007)。-show:通过 OpenCV 窗口实时显示推理画面。-cf:配置文件路径。上述命令中的配置文件路径是双臂任务用的。单臂任务请参考同目录下的airbot_play_with_usbcams.yaml。你应根据使用情况修改文件中的配置,例如摄像头索引、机械臂端口等。使用 Realsense 摄像头时,请参考airbot_play_with_realsenses.yaml。-mts:评估每次 rollout 的最大时间步数,通常等于或略大于单次 episode 的长度。
机械臂启动并移动到任务定义的初始姿态后,你会在终端看到提示:
Press Enter to start evaluation or z and Enter to exit...(不使用 -show,请点击终端并按对应按键)
或
Press Enter to start evaluation or ESC to exit...(使用 -show,请点击任一图像窗口并按对应按键)。
每次评估完成后,你可以在当前目录的 eval_results 文件夹内对应时间戳的子文件夹中找到与评估相关的文件(包括过程视频)。
13.8 查看数据#
模型训练完成后,关键信息和数据集统计将存储在 key_info.pkl 和 dataset_stats.pkl 文件中,可通过以下步骤查看。
进入仓库文件夹并激活 conda 环境:
然后,使用以下命令查看指定时间戳的信息:
你将在终端看到该任务相关的关键信息,包括:
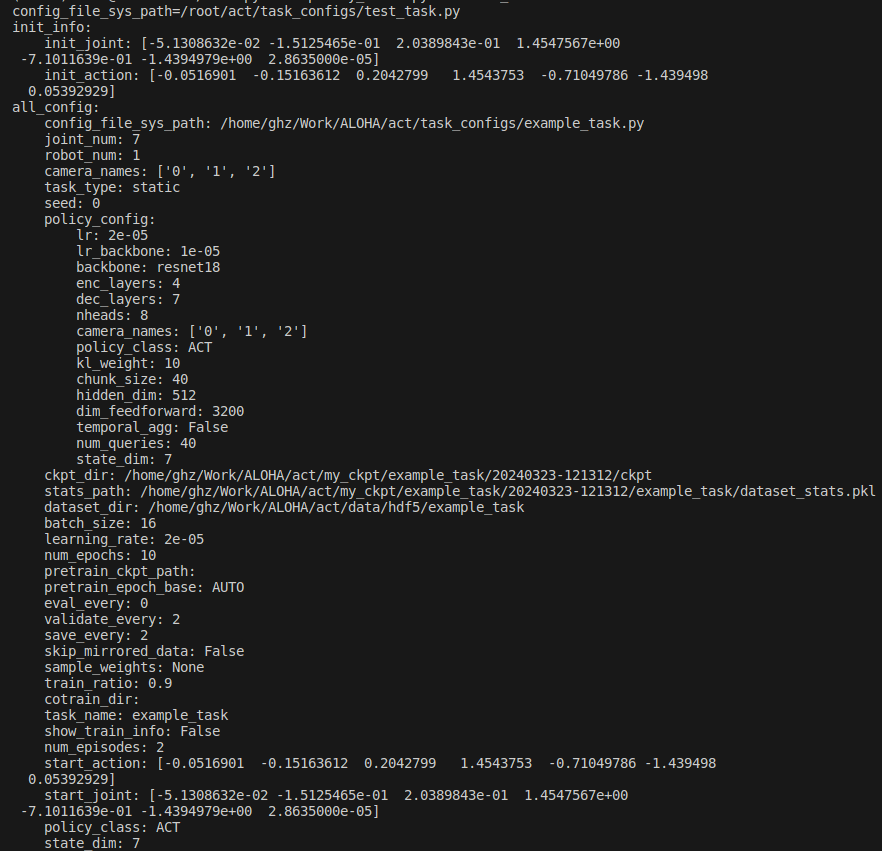
这些信息包括训练过程中使用的 mcap 数据的绝对路径、训练参数配置、推理时第一条 episode 的初始关节值以及其他信息。
这些信息有助于保证实验的可复现性。如果摄像头刚性固定在机械臂上,复现机械臂动作相对容易。物体摆放则可以通过重新训练数据来确定。
对于数据集统计,只需在上述命令中设置 -in stats 即可。