开箱安装#
本步骤约花费 5 分钟。
包装清单#
开始之前,请确保箱内包含所有必要的组件:

| 序号 | 名称 | 数量 / 单位 | 备注 |
|---|---|---|---|
| 1 | AIRBOT Play 机械臂 | 1 台 | 包含末端连接件 |
| 2 | 安装底板 | 1 个 | |
| 3 | 桌面安装夹 | 2 个 | |
| 4 | USB 数据线 | 1 根 | 连接机械臂控制面板与电脑 |
| 5 | 电源适配器 | 1 个 | |
| 6 | 电源线 | 1 根 | |
| 7 | 螺丝及L 型扳手 | 1 包 | M3 规格 |
| 8 | 示教器 | 1 套 | 选配,含连接线 |
| 9 | 夹爪 | 1 套 | 选配,含连接线 |
机械臂安装与固定#
注意:
安装时,必须确定机械臂处于开阔空间,以防机械臂在运动时碰撞到周围的人或物品。
- 取出臂、安装底板、M4螺丝*4、L型M4扳手。
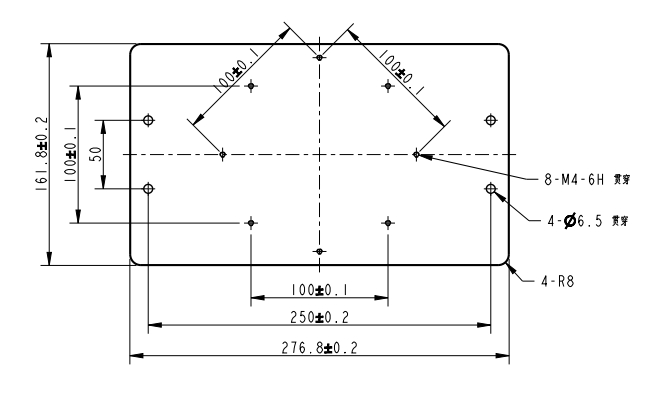
- 机械臂底座采用螺丝固定方式安装。通过安装底板,可将机械臂固定于桌沿:使用两个桌面安装夹将安装底板固定在桌面上,再使用四个M4*10螺丝将机械臂固定在安装底板上(可根据场景按不同的角度将臂固定:横向 / 斜 45 度 / 竖向)。

- 如需安装机械臂至其他设备,用户可参照安装底板的孔位尺寸,自行设计固定转接件。
末端执行器安装【选配套件】#
AIRBOT Play 目前支持以下两种官方版本的末端执行器,无论是否连接末端执行器,机械臂均可启动使用:
AIRBOT Gripper 2: 二指夹爪,代号G2,AIRBOT G2 是 AIRBOT Play 的标准末端执行器。它是一个平行二指夹爪,可以通过电机控制开合。AIRBOT Encoder 2: 二指示教器,代号E2,AIRBOT E2 是 AIRBOT Play 的标准末端示教器。它是一个带有开合机构的末端执行器,可以通过开合操控另一个二指夹爪的运动。
-

AIRBOT G2 二指夹爪 -

AIRBOT E2 示教器
其他末端支持
此外,AIRBOT Play 也可支持其他末端,如灵巧手甚至自制夹爪,有需要请咨询技术支持团队。
相机支持
如需安装相机连接件以固定相机,需安装在末端连接件与夹爪之间,连接件配件及图纸请咨询技术支持团队获取。
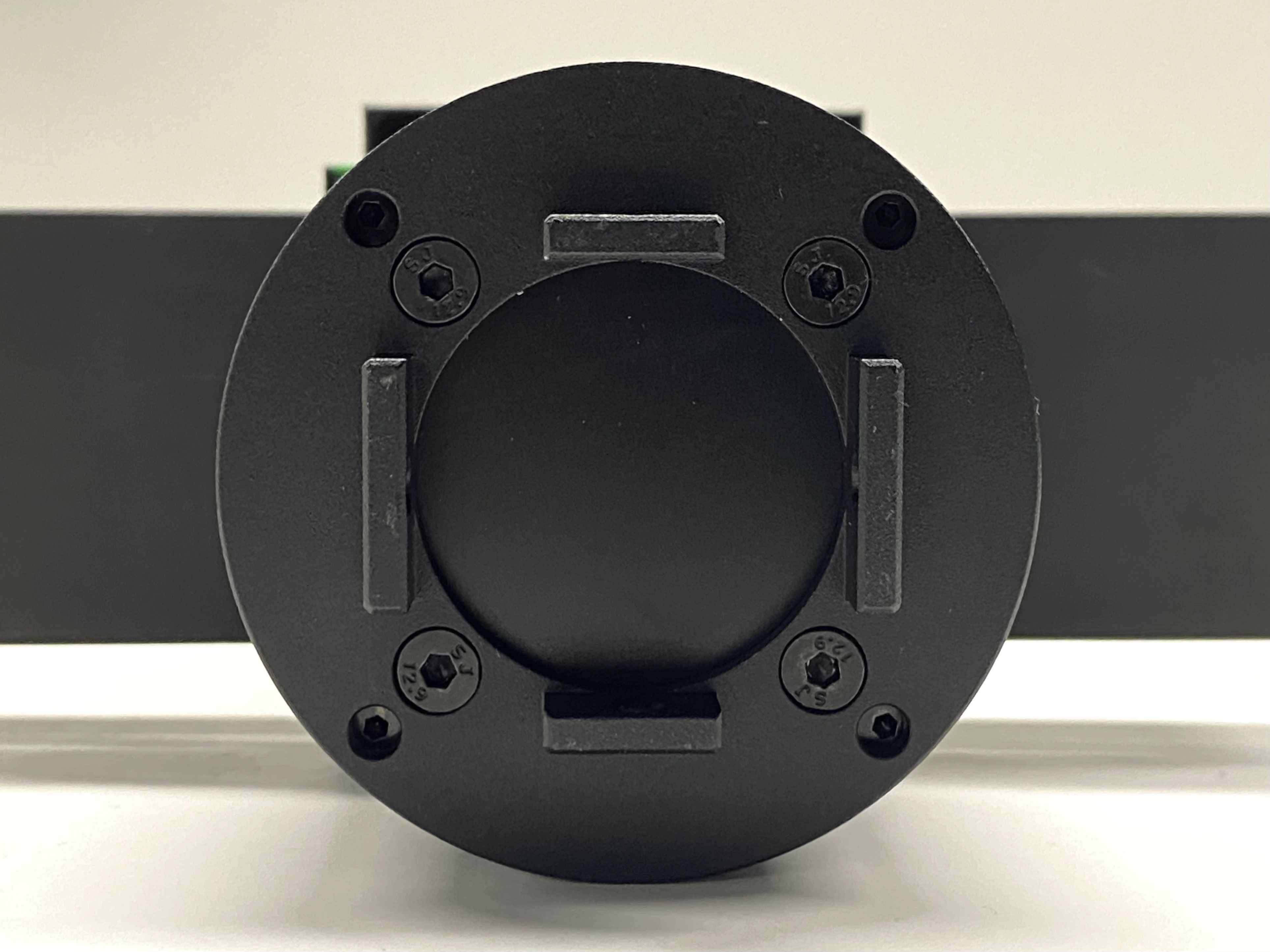
安装准备:如下为机械臂末端连接件,出厂时默认安装。安装末端执行器时,需先:
-
机械臂末端需旋转至用户按钮侧朝下;
-
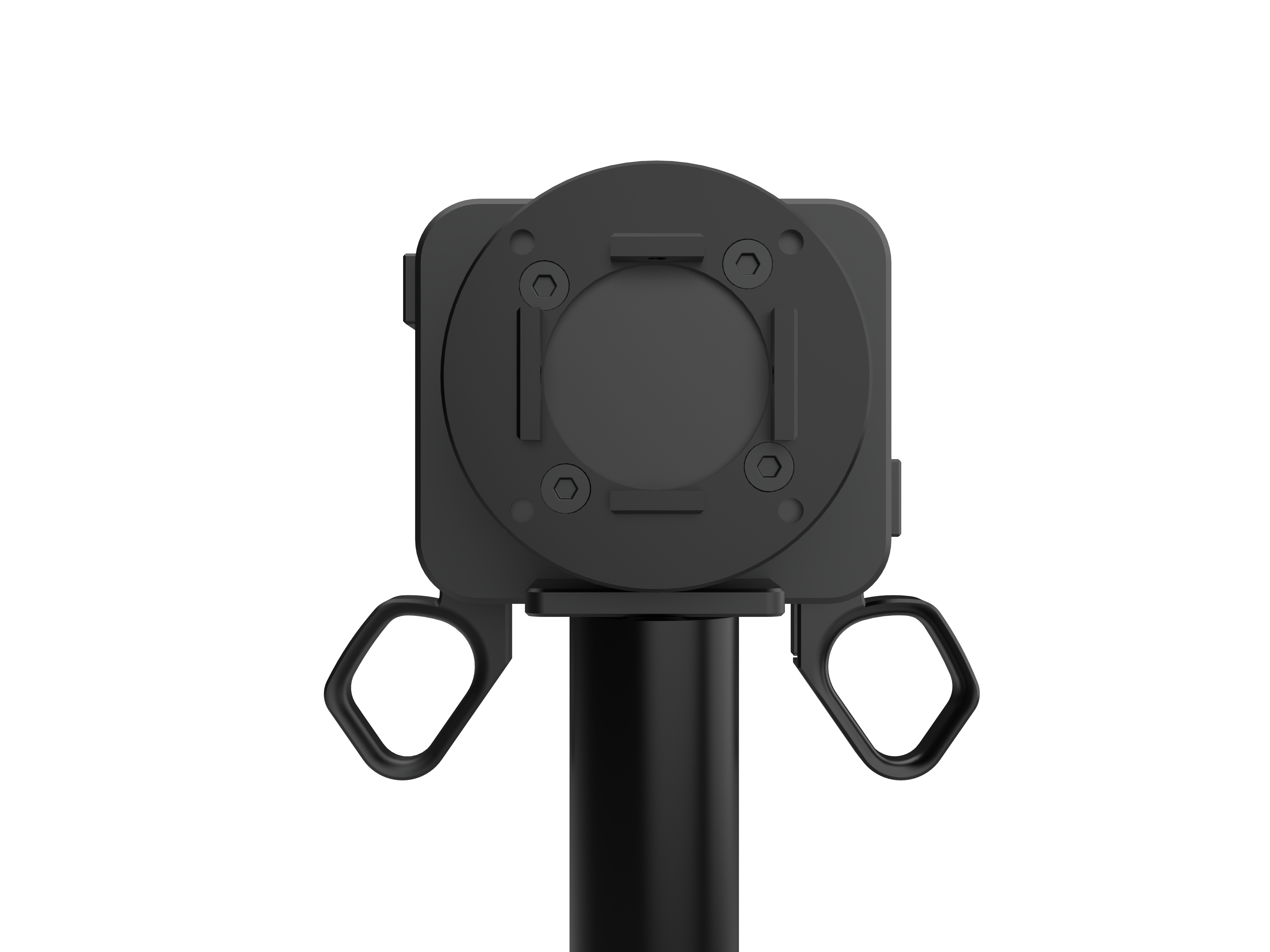
将连接件旋转至如图所示位置,突出的水滴状限位朝下。

机械臂末端连接件摆放示意图
-
安装夹爪
取出夹爪、M3螺丝 * 4,如下为夹爪的的连接固定位,将其放入臂的末端连接件中,从侧面孔位固定安装。
夹爪电机连接固定位置图 
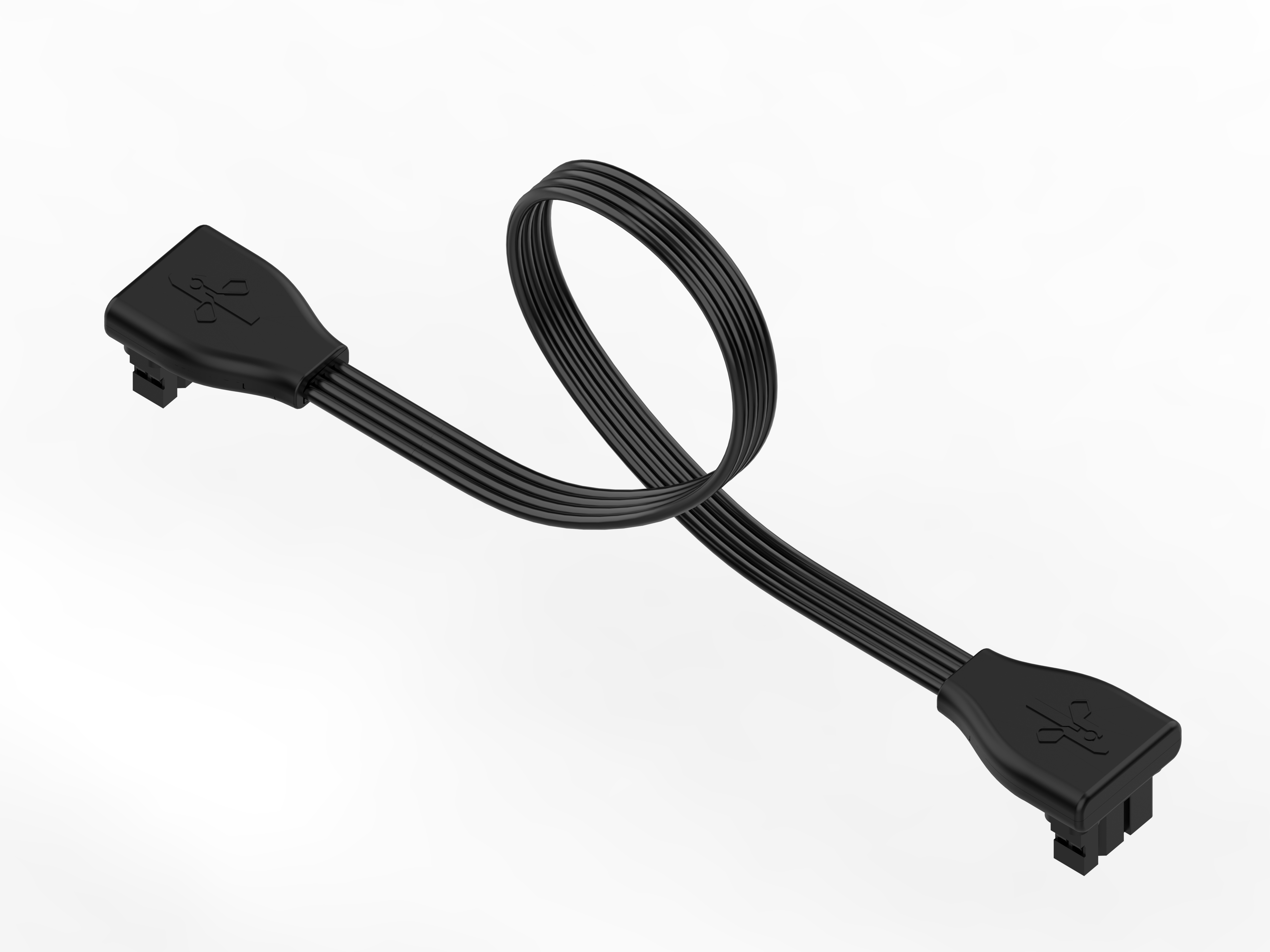
夹爪螺丝安装位置图 取出夹爪配套的连接线。
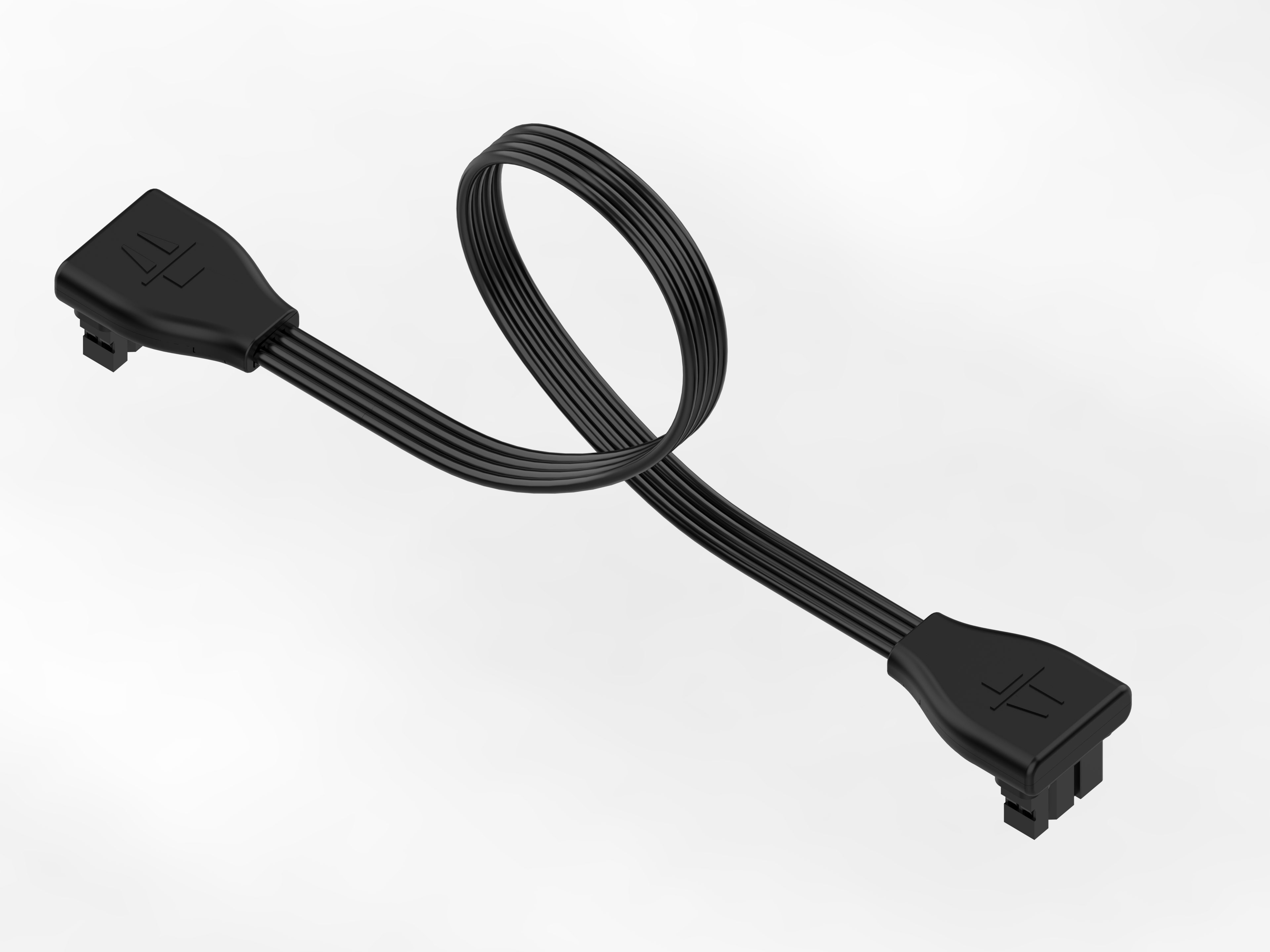
夹爪连接线 找到如下图所示插口并安装。
注意:
- 根据连接线上的标识,区分夹爪与示教器的连接线;
- 严格按照图示位置,连接机械臂末端J6关节与夹爪电机,不要连错其他电机;
- 避免强行拉拽线,造成接触不良,安装或取下时拔插两个端口处。

图2.13 夹爪安装实物图 -
安装示教器
取出夹爪、M3螺丝 * 4,如下为示教器的连接固定位,将其放入臂的末端连接件中,从侧面孔位固定安装。
示教器电机连接固定位置图 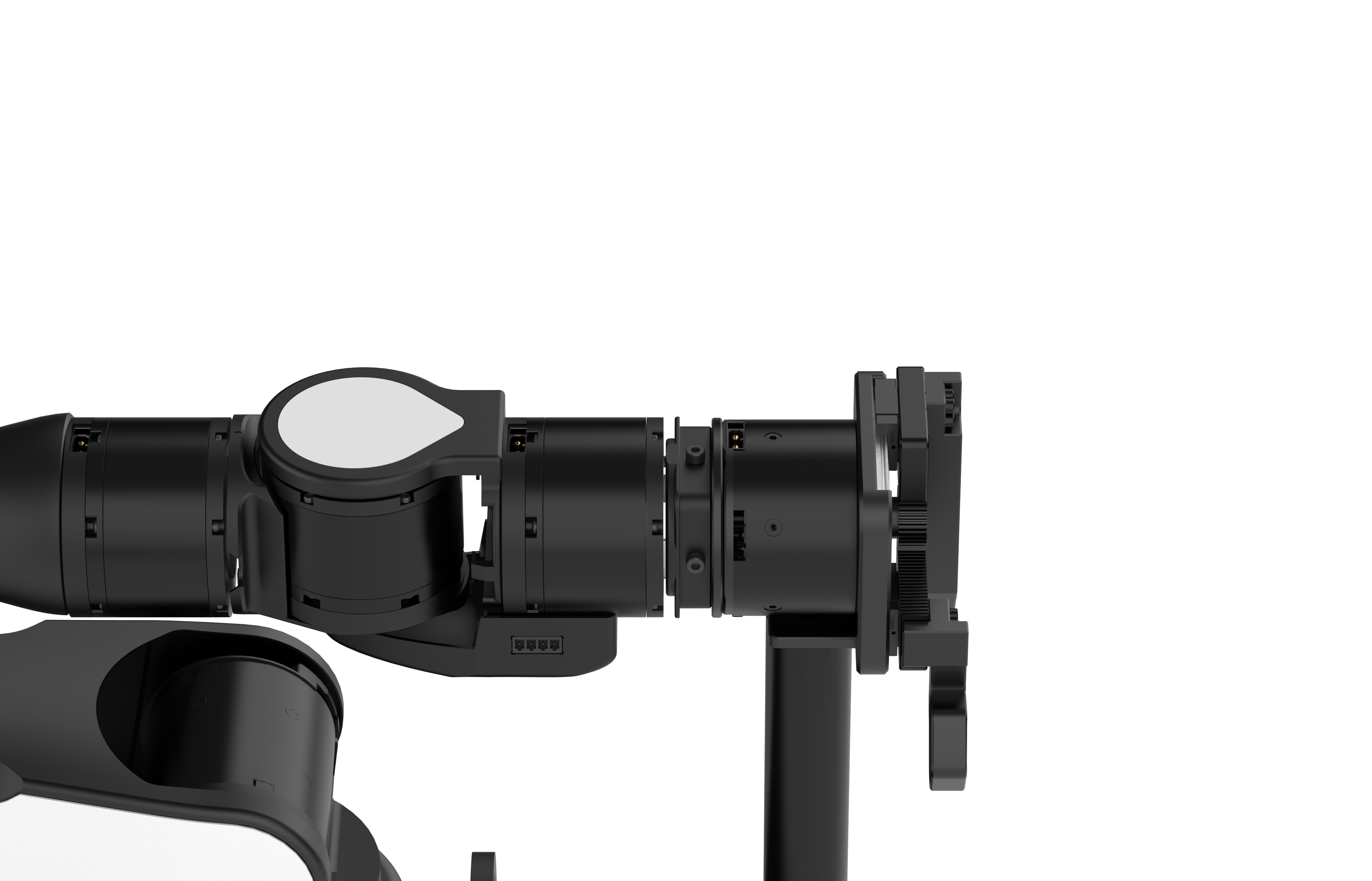
示教器螺丝安装位置图 取出示教器配套的连接线
示教器连接线 找到如下图所示插口并安装。
注意:
- 根据连接线上的标识,区分夹爪与示教器的连接线;
- 严格按照图示位置,连接机械臂末端J6关节与示教器,不要连错其他电机;
- 避免强行拉拽线,造成接触不良,安装或取下时拔插两个端口处。

图2.18 示教器安装实物图
底座连接#
底座面板接口如下图所示:

-
电源接口:用于连接机械臂的电源线,通过电源适配器输出的航空插头连接。
注意:
1.连接电源适配器与电源线,相连的接口需用力插入,确保连接紧固。
2.连接电源适配器的航空插头端口与 AIRBOT 机械臂底座面板的电源接口,航空插头的黑色扁平端应朝下。

-
信号接口:用于连接信号线。
USB
-
USB-1 (TypeC) 接口将末端相机信号传递至上位机,用于末端视觉传感器数据传输。
-
USB-2 (TypeC) 接口将通过USB数据线连接上位机,用于数据传输和控制。
-
常用连接方式如下图所示,当成功连接信号线时,状态灯条进入白色呼吸状态,启动驱动服务后,灯效灯条变为绿色呼吸状态,此时可被电脑控制。

-