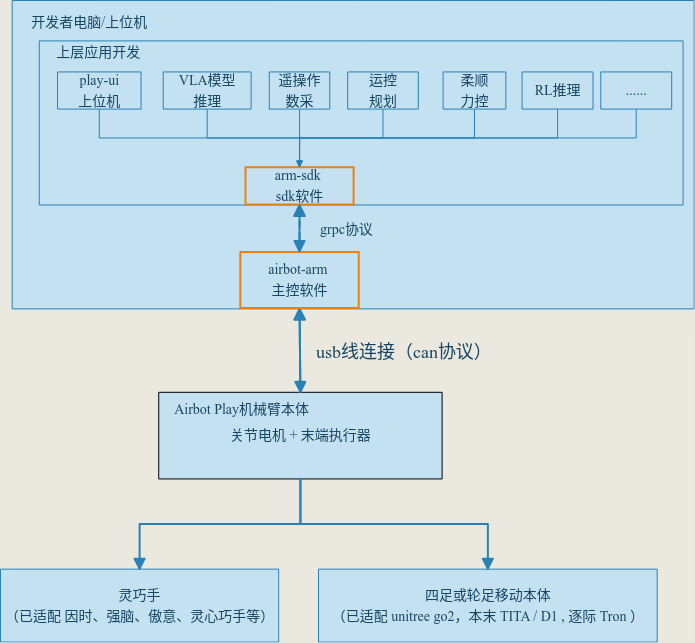
SDK 简介与架构# AIRBOT Play SDK:用户可以通过调用SDK中的API接口,实现机械臂的运动控制与状态获取,并以此为基础二次开发自己的软件业务功能。 整体架构图# 下图呈现了开发者电脑与Airbot Play机械臂本体的系统组成及交互关系: 开发者电脑和机械臂通过 usb-typec数据线连接 开发者电脑通过 airbot-arm软件包启动机械臂,再通过上层 sdk-client 提供的API接口控制机械臂完成各种场景的应用