跳转至
AIRBOT Documentation
查询例程列表
English
简体中文
正在初始化搜索引擎
文档中心
AIRBOT Play
AIRBOT MMK2
数据采集与模型复现
AIRBOT Documentation
文档中心
AIRBOT Play
AIRBOT Play
Changelog
文档阅读指引
▸ 快速入门
▸ 快速入门
产品简介
硬件安装
基本功能
快速点亮
快速点亮
环境准备
环境准备
电机版本确认
查看机械臂 CAN 口
关节限位值说明
安装与启动
安装与启动
软件安装
运行主程序
运行示例
运行示例
查询例程列表
查询例程参数
运行例程
⚙ 开发指南
⚙ 开发指南
SDK
SDK
概念指南
概念指南
SDK 简介与架构
控制权机制(Lease)
控制模式说明
运动规划原理
运动规划原理
PTP 点到点规划
LIN 直线轨迹规划
CIRC 圆弧轨迹规划
多段轨迹融合规划
机械臂状态与灯效
API
API
数据结构
数据结构
Controller(控制器)
ArmControlOptions(控制选项)
ArmState(机械臂状态)
EEFState(末端执行器状态)
CartesianPose(末端位姿)
ServiceState(服务端状态)
FirmwareInfo(固件信息)
接口总览
使用示例
附录
附录
电机错误码查询
支持的示教器与夹爪型号
AIRBOT MMK2
AIRBOT MMK2
Changelog
文档阅读指引
▸ 快速入门
▸ 快速入门
产品简介
硬件说明
软件配置
☰ 用户指南
☰ 用户指南
主要功能
上位机
用户须知
⚙ 开发指南
⚙ 开发指南
SDK概述及使用示例
Python API
相机配置
◎ 科研应用
◎ 科研应用
数据采集
模型复现
模型复现
ACT
数据采集与模型复现
数据采集与模型复现
⚙ LeRobot Play数据采集
⚙ LeRobot Play数据采集
Changelog
数据采集方案
模型复现
模型复现
PI0.5
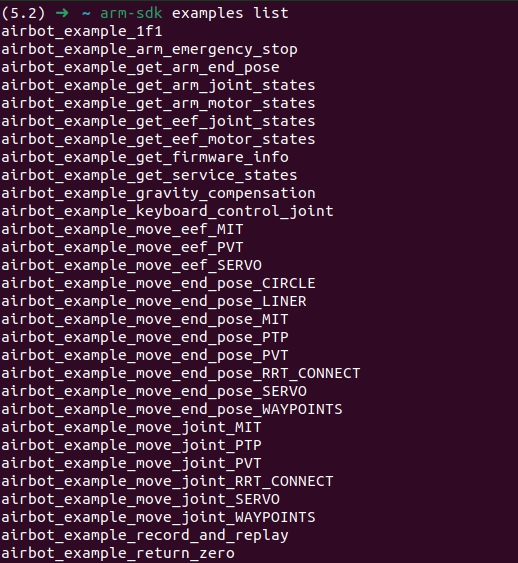
查询例程列表
#
在安装完成SDK的whl包后,
并且确保airbot-arm成功启动后
,在终端中输入如下指令可以查询examples例程:
arm-sdk
examples
list
输出如下:
回到页面顶部